
Mind Flayer began, as all crazy robots do, with a seemingly crazy question being pushed until it reaches its natural end. With Demogorgon’s defeat in 2023, there was little motivation to bring it back in 2024 even though much of its components were still in working order especially its blade. When looking at all these parts, a simple thought came to mind: “why not turn the blade more vertical?” By rotating it 90 degrees it means that now instead of the forces from a vertical spinner going the direction of breaking the bearings it now goes in the direction of bending the shaft. It is not perfect loading, but since Demogorgon’s issue has been the bearings being torn out and not the shaft bending, it was worth a try to see how far this idea could go.
Mind Flayer Physics
This jump is a bit out of order as you can already see the machine done before we work through the build process, but the actual mechanics of this were very simple whereas the physics this bot intended to test are very interesting. The actual behavior of Mind Flayer’s weird ideas definitely flays the mind so let’s take its main test as our baseline. When it turns to the left the bot seemingly remains stable and can rotate but when it turns right the machine aligns itself vertically with the blade sitting below the machine and the whole machine rotating about that axis. So why is that the way it is? Simple answer: gyroscopes!
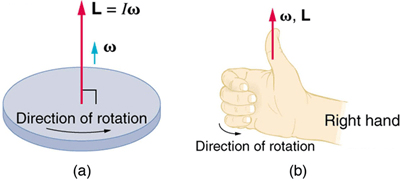
The right-hand rule is a common physics technique for rotating elements. The general idea is that if you have a rotating body then it creates a force perpendicular to its rotation in the same direction as your thumb sticking up on your right-hand. This is the torque which makes the blade resist falling over. As Veritasium explains, it means that when you increase the speed on a blade (say up to 250mph or so) your blade will have a lot of torque and resist changing direction. This effect happens to all machines (especially vertical spinners where the gyroscopic procession is shown in the form of a “gyro dance”) but it is largely negated in horizontal spinners as their torque is directly countered by gravity and, since the machine remains on the same plane in normal operation, doesn’t force the blade to change direction allowing them to move freely albeit having to deal with the reactionary force of a blade as it ramps up or down.
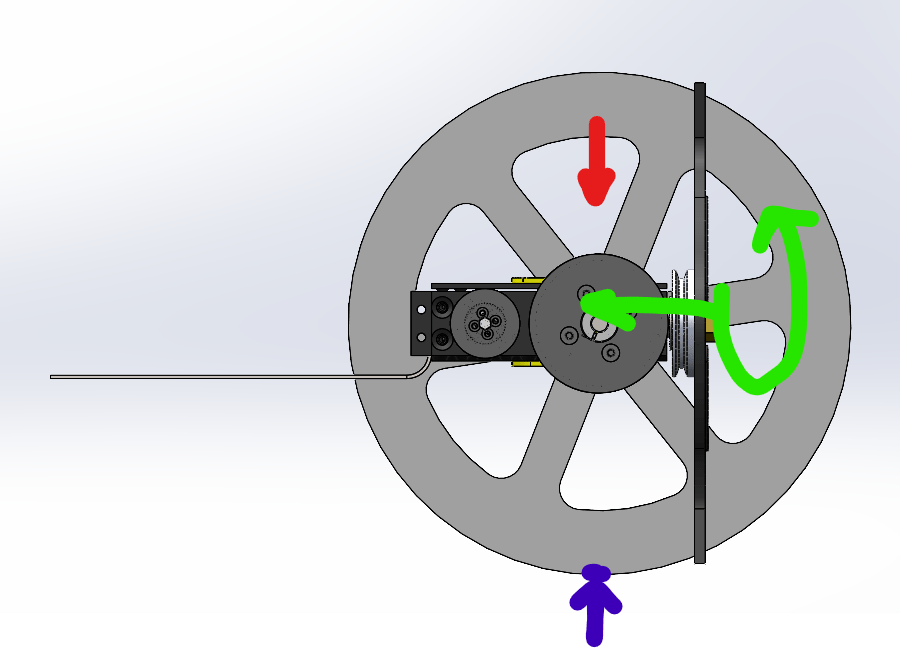
In Mind Flayer’s normal configuration you can see this issue as the blade creates a torque (green) perpendicular to gravity (red). The force of gravity is therefore offset entirely by the wheel as it rests on the ground (purple) leading to an unequal vector. Its important to note this only comes into play as a result of the robot trying to move so if MF stays still and just spins the blade it will sit perfectly still. However as soon as you begin driving the robot and the blade is forced to change direction as the machine rotates about its drive axles that this green arrow begins to play a role.
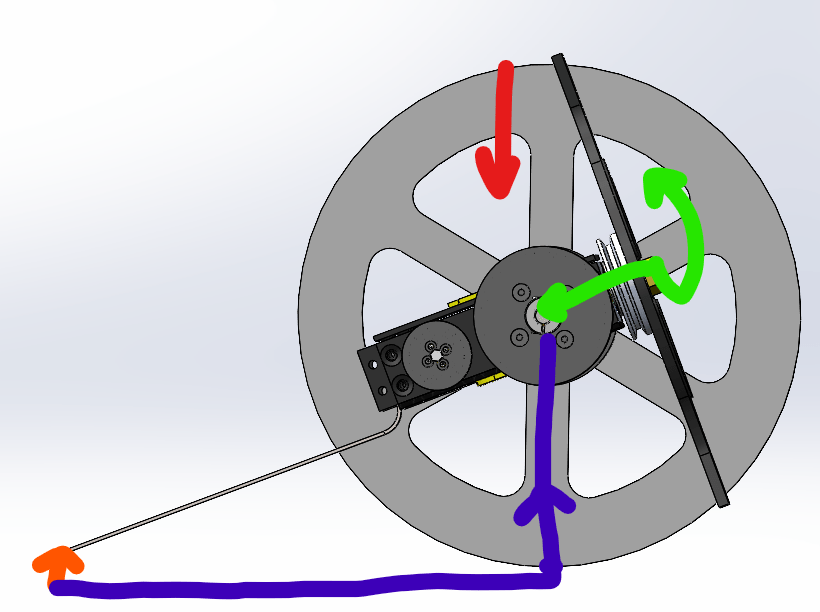
When the robot turns left, the machine begins to rotate in the same direction as the blade which adds to its rotational power and makes it want to ramp up. Since the entire body is rotating about the drive axle the blade wants to orient to a more stable direction (i.e. horizontal) so it rotates upward until the tail touches the ground (orange). The tail acts as a counter lever to the blade by using the contact of the wheel to the ground as a new fulcrum point (purple). As a result, the downward force is cancelled out (gravity in red) with the upward forces (reaction force on tail in orange, ground pushing up on wheel in purple) and the torque of the blade trying to align vertically (green) is also countered by the reaction force on the tail. In theory the harder you turn the more the blade will try to rotate the whole machine which is why sometimes the left wheel will begin to lift off the ground due to the torque trying to rotate the whole machine over kind of like a monster truck doing donuts but way more forces working against it.
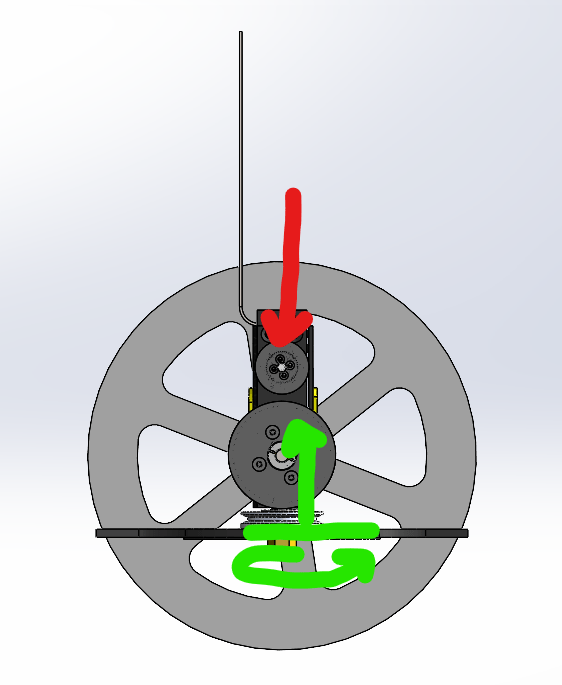
In contrast, when the machine turns right and tries to cancel the rotation of the blade, the blade will push very hard against it almost locking the robot in place. As the blade’s power decreases, it begins to rotate downwards (as gravity is now leveraging the heavier weapon assembly over as a torque) down until it reaches a stable position which in this case means directly under the robot. Once the blade is under the chassis the robot now becomes incredibly stable as the blade wants to maintain its stable orientation, the torque is now directly in line with gravity and the wheels which effectively becomes a net zero equation, and the tail is no longer able to apply another torque causing the robot to effective stay in place. This is why the robot can’t move at this position until the blade’s power changes (either being increased by turning left causing it to create change its stability and rotate up or to turn off and the machine effectively acts like a regular thwackbot). There may be a few more questions about this process and perhaps it can be reexamined by others with their theories, but for now the key takeaway is this: driving this robot would be incredibly hard. Now that we know what we’re up against its time to build the machine!
Build Time
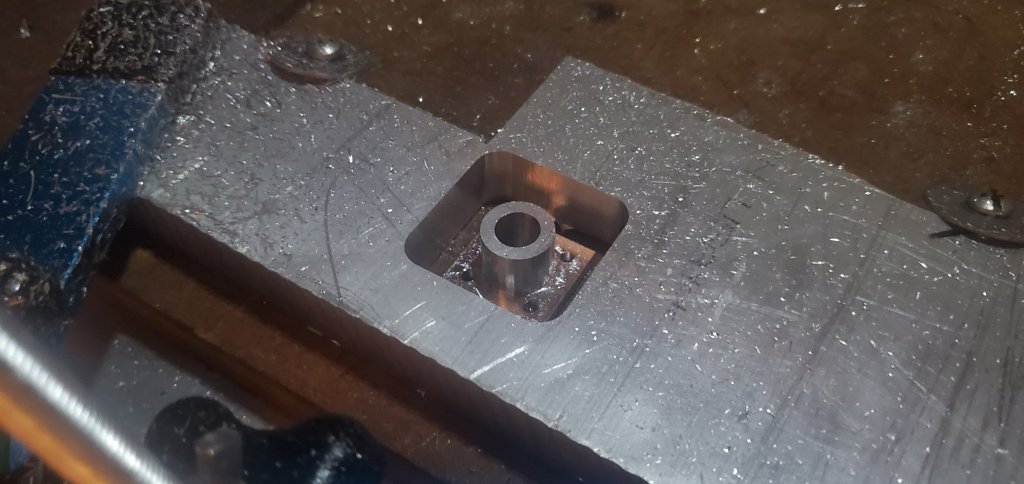






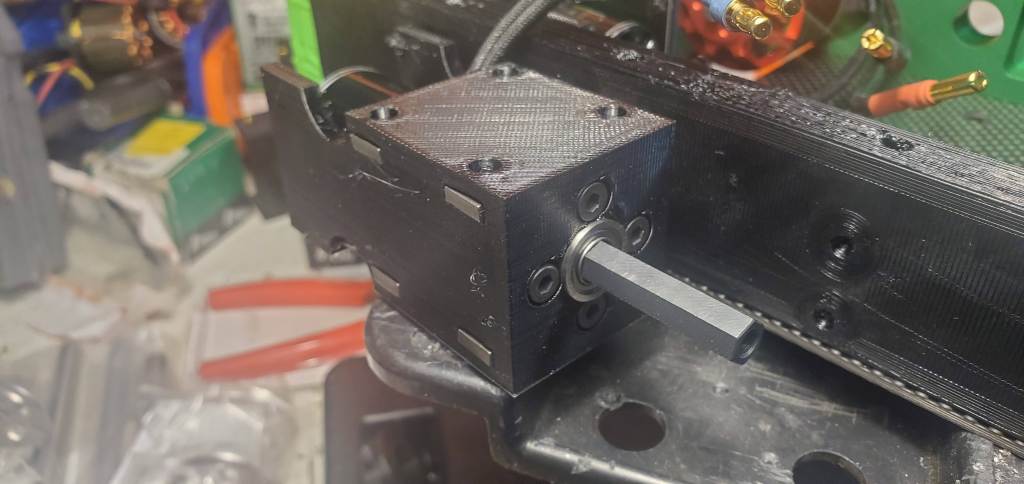




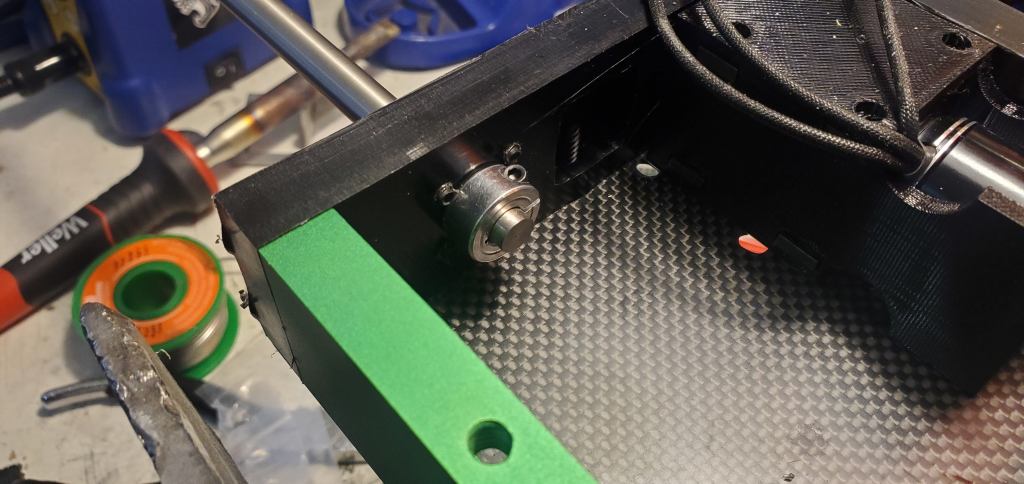
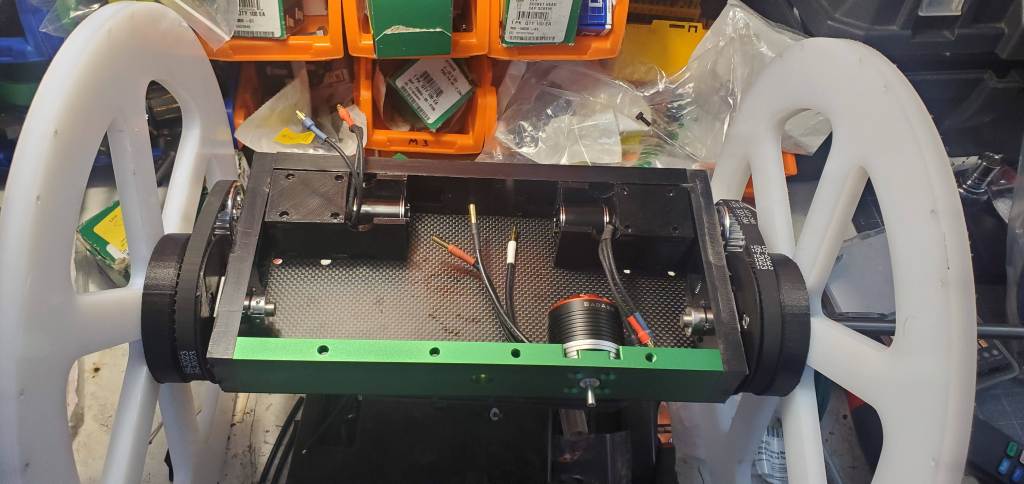
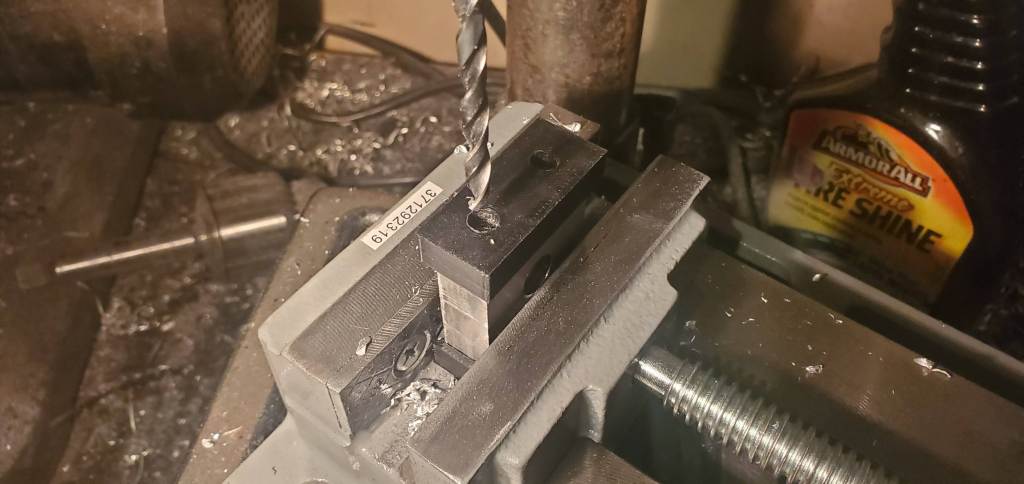

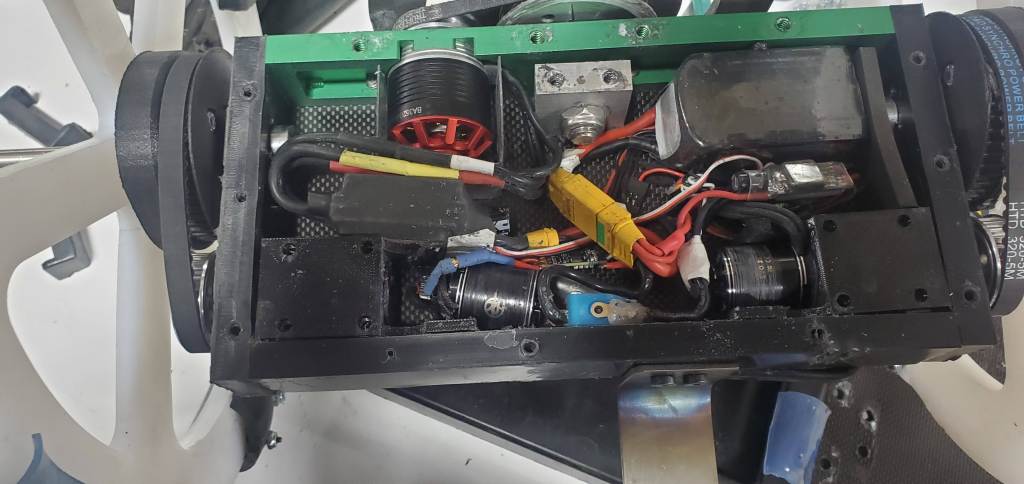
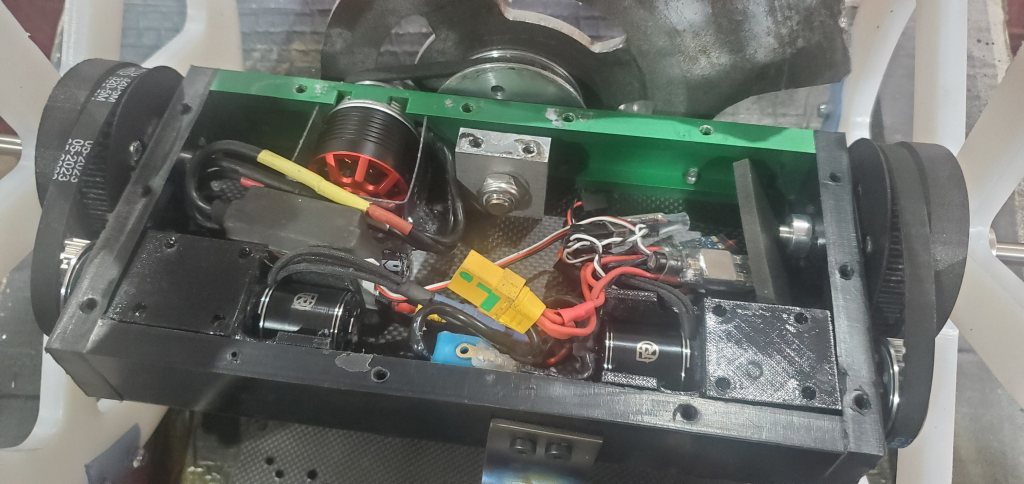
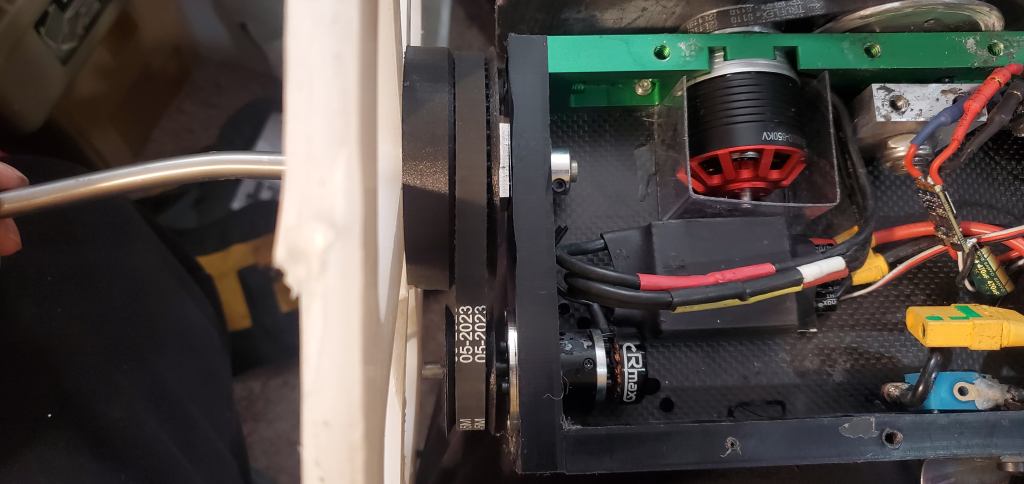
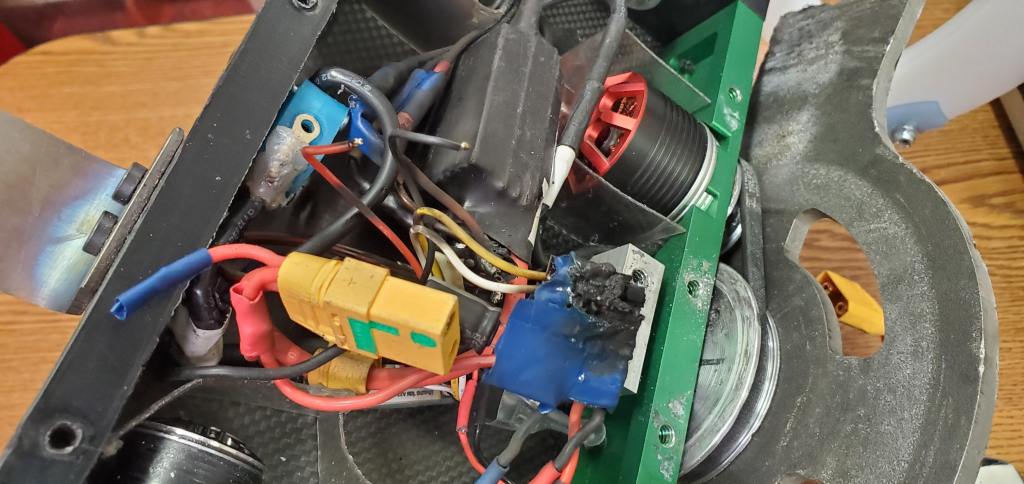
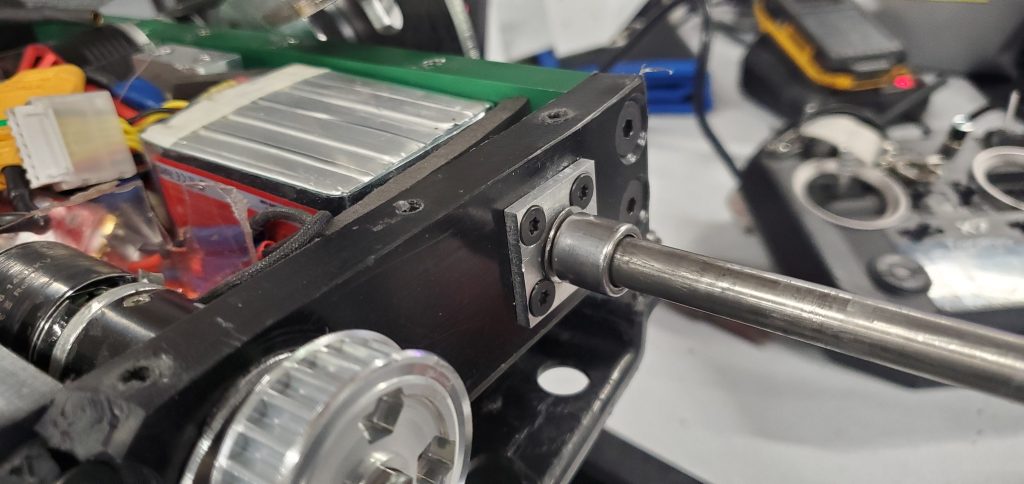
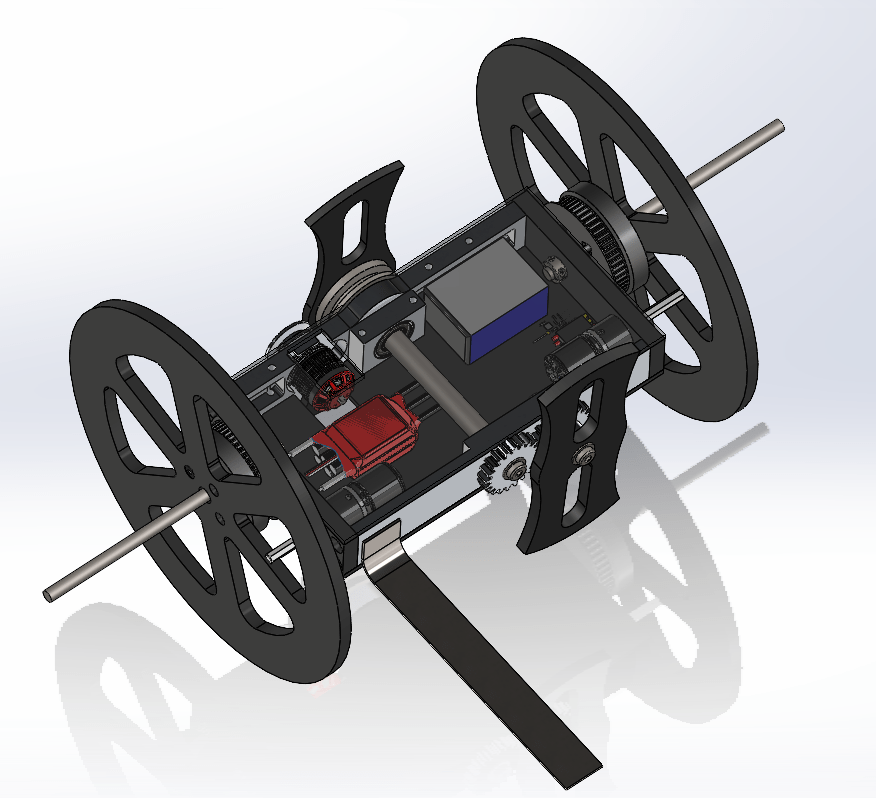
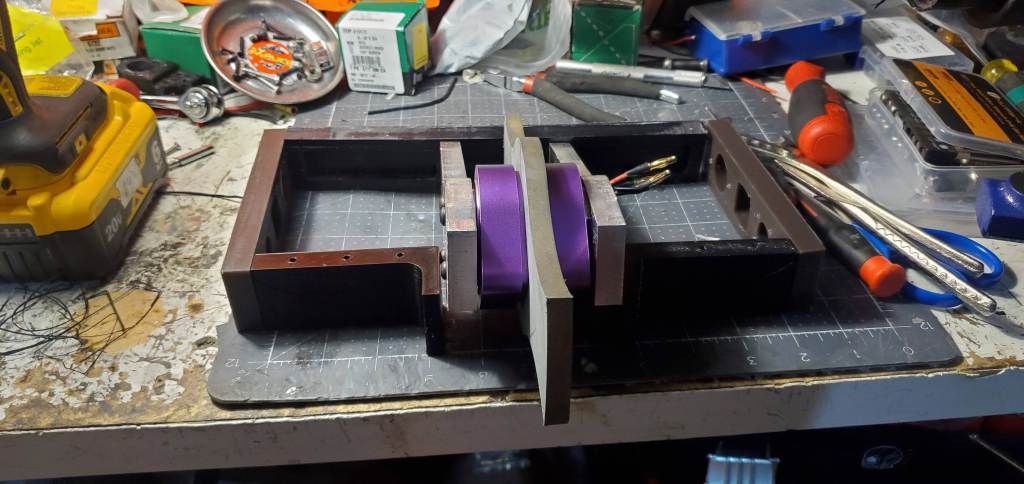
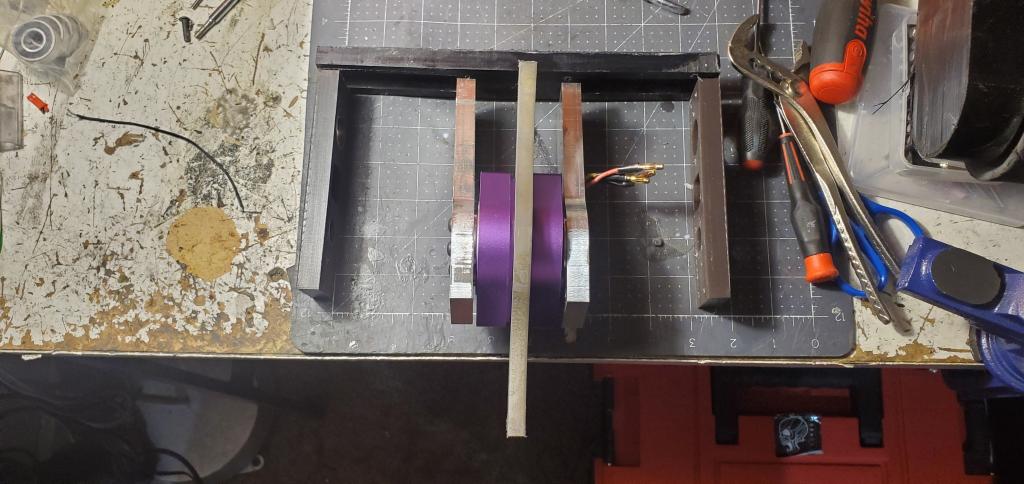
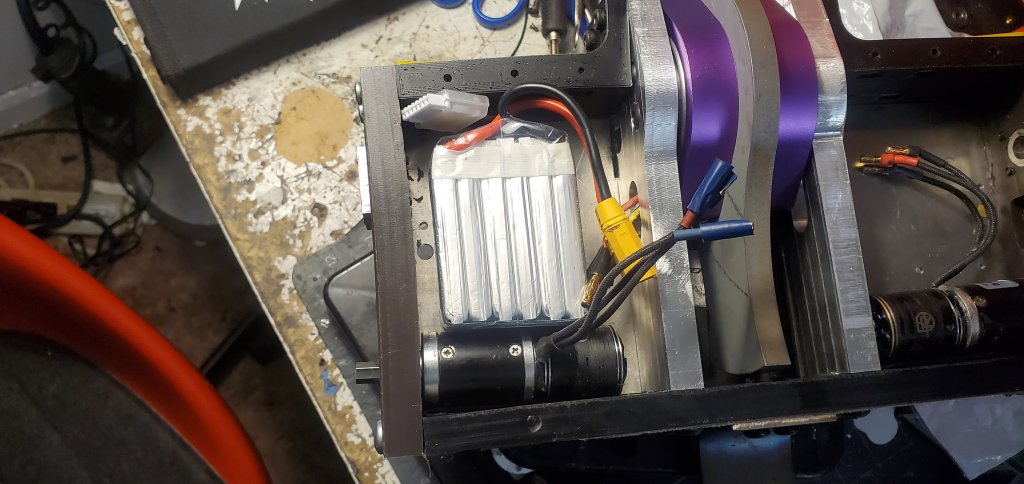
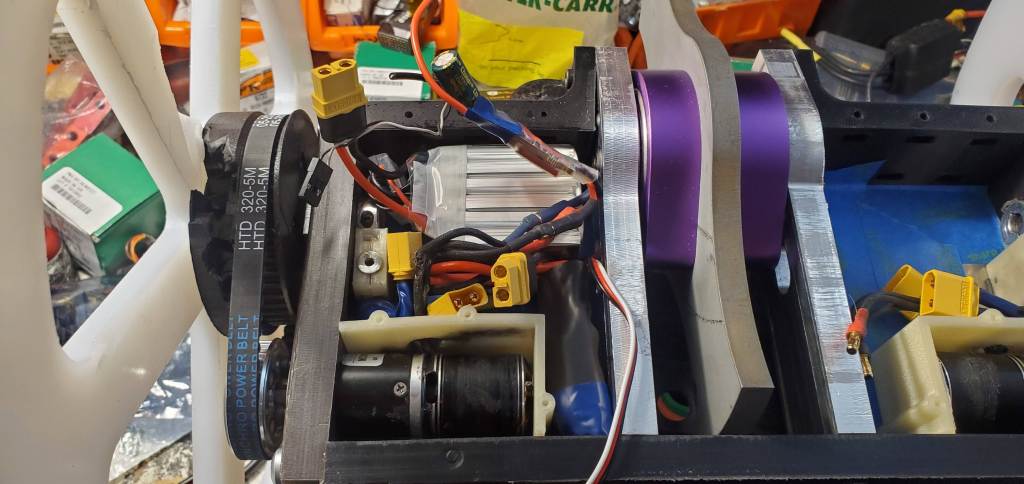
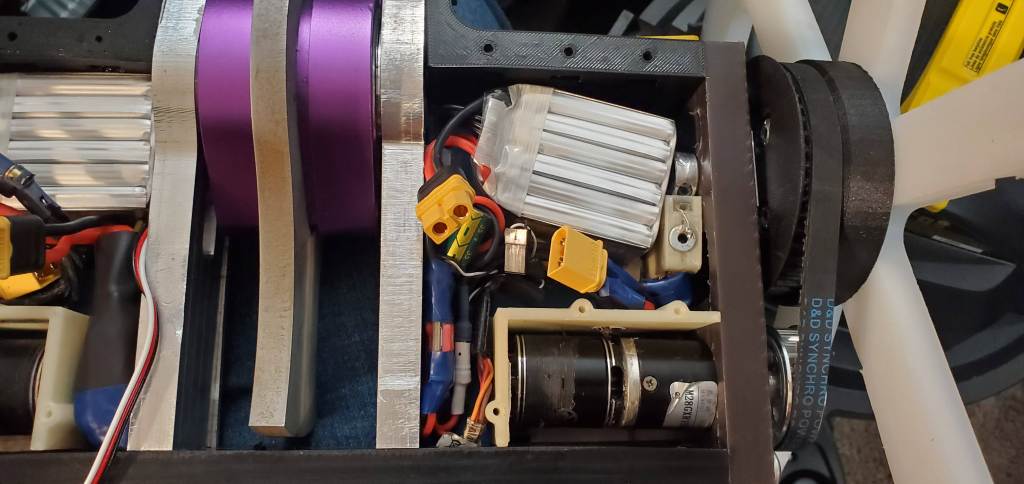
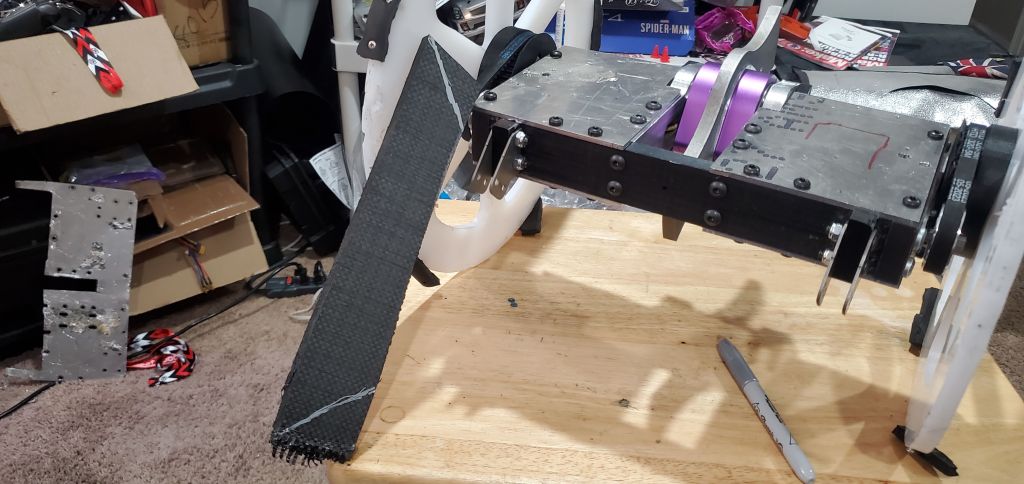
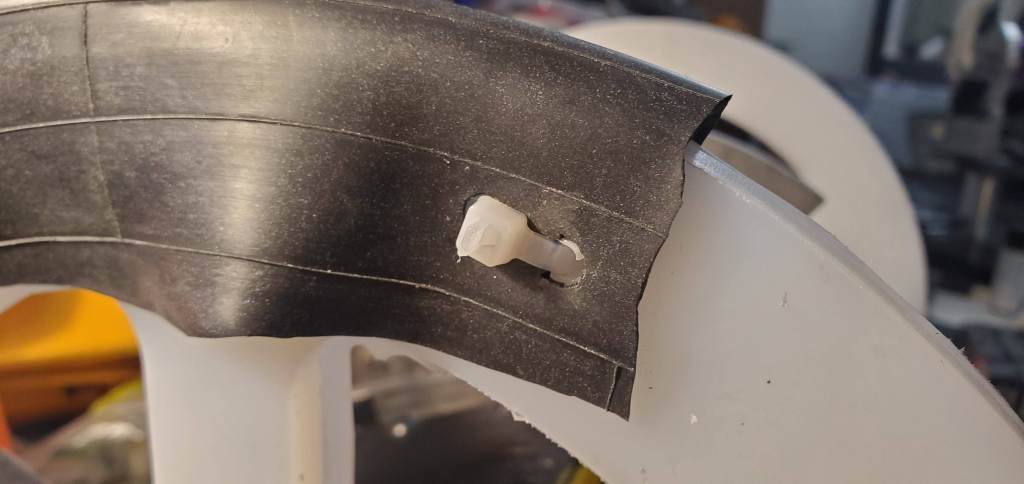
The build of Mind Flayer was incredibly straightforward. The entire robot is basically a box with all the drive and weapon components hanging out in the open area. The green front rail is basically Demogorgon’s weapon system but simplified to a single rail. The weapon motor keys into the front rail to transfer all of the shock away from the mounting screws. The shaft is the same 1/2-13 shoulder bolt that screws into a supporting block. It may seem small, but this little block does a lot to resist bending so it’s critical to maintain. The drive motors were the Repeat Ultra Mk1s with the intention of using the Repeat 35A AM32 ESCs for drive. Since the Ultra is a round 28mm tube, a TPU cage was made around it to support it and help mount the carbon fiber top plates. 10-32 square nuts were then inserted to provide threads to screw into. An AB90 was used as the main power switch. Since the UHMW used on the rest of the chassis is a softer material than the steel drive rails the steel will gradually wallow out the hole and lose tension on the belt. To ensure no issues on that, a aluminum insert was added which would spread the load and resist wallowing out for far longer.






The last adjustment was to use some leftover 3mm Grade 5 Titanium for the tail. Since the UHMW was soft and the screws that secure the tail would gradually be pulled out the tail was secured with a through bolt and locknut. Also note that the robot was very stable with the blade on the bottom, further indicating the tendency of the machine to stabilize in that position when disturbed.
Motorama 2024






You can review the event report here, so here are the high-level takeaways:
- The high striking height makes it a menace to normal vertical spinners and the ability to change the blade height mid-match allows for great potential striking attributes. Since the blade height is directly linked to the tilt of the machine, the striking edge can be as low as the vertically aligned position (which can <1in) and as high as the full hand-stand (~6in or more depending on wheel diameter). For normal big wheeled robots your diameter is effectively set before the match so the opponent can design normalized armor around it. In theory with this someone can design for the lower distance but not have much higher armor that the blade could then specifically target. In the fight against Torrent the robot effectively targeted the top armor through its gyro tilt and crazy drive so if that could be leveraged more few things could stop it.
- It is incredibly hard to drive this machine due to the gyroscopic forces being leveraged against you. Due to the same physics that allow the feature above, this was also an issue too. Even with having a general understanding of the physics of the machine, these tendencies are naturally opposed to the style of every other machine. This means either I have to constantly reset my mind to drive this correctly or this machine has to change (and it is not going to be me).
- It needs a better drive solution that doesn’t generate tons of heat. The Repeat Ultras have a low reduction and high power motor which means they have excess power to drive the large UHMW wheels. In theory they would reach up to 30mph which is entirely unnecessary and burned up the 35A ESCs while running on 6s. If this can be tuned down it could have avoided the dying issue at the competition.
- It needs better internal support and managing of components. Its clear things moved around during its fights and likely contributed to some of its issues.





One of the first efforts to test was how much motor was required for drive. I attempted to use a Repeat Max V1 leftover to get a quick increase of reduction and decrease in motor power. It also had the secondary benefit of creating even more internal space for bracing. It definitely feels at the upper limit of the power level for this motor, but nothing beats a failure but a try.
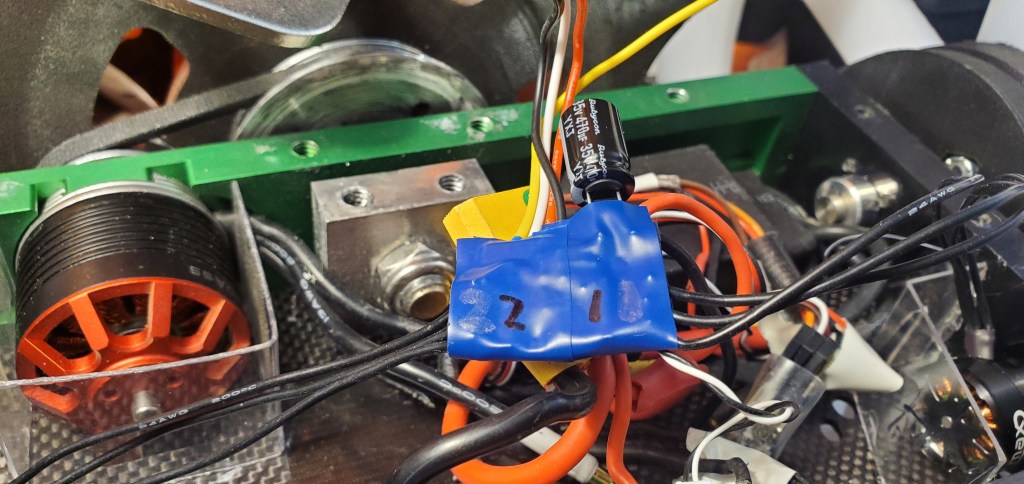
To go along with the smaller motors, it was also going to be the first time trying the Repeat AM32 Dual ESC. Once again, definitely near the upper limits of these components’ potential but on a machine that was already a crazy idea it seemed within its design ethos. Unfortunately, I found the upper limit of these systems pretty fast in testing. You know what they say, nothing ventured, nothing gained!









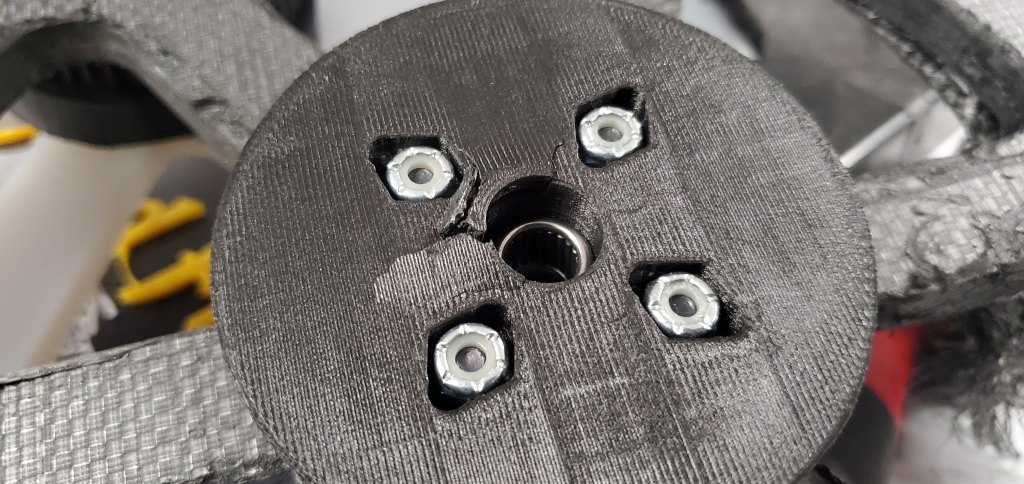
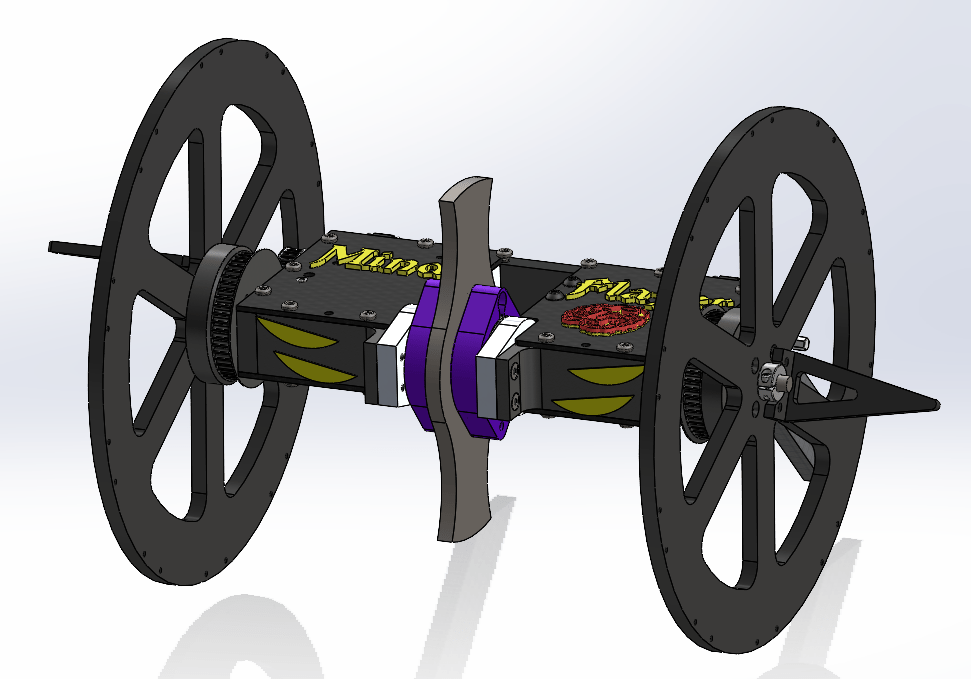
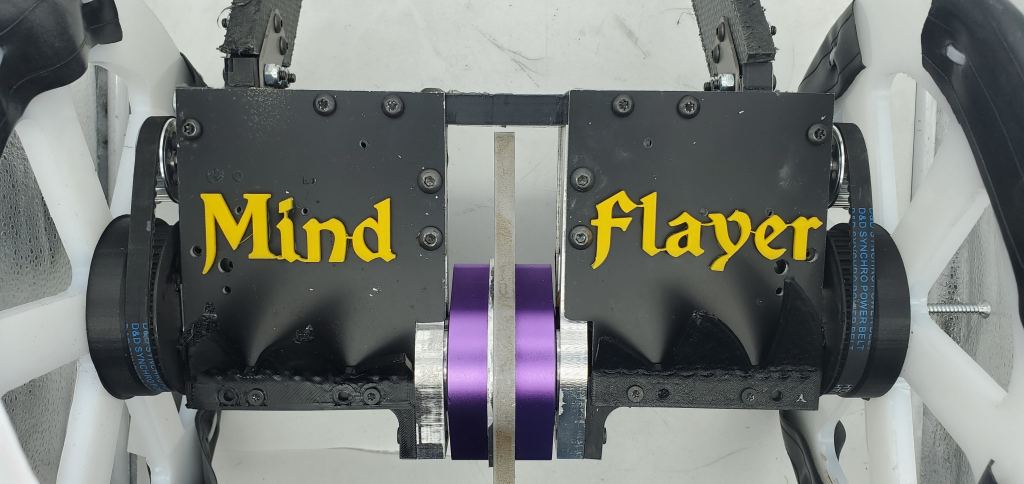
After the lessons were learned from post-Moto testing, it was time to ramp up for April NHRL! Internals were switched back to the Repeat Ultras and Sequre 70A ESCs were added for drive. A slightly shorter blade was made with a new hub to go with it. New 1/2″ Tegris wheels were made for nasty horizontal spinners like Maximizer. Most importantly, a name and graphic were created! Its not often robots have nameplates on them, but its always an appreciated touch to make it more than a black box (even if its a strangely shaped one). With that in mind, on to the event!
April NHRL




Full details of the event can be found here. As for Mind Flayer, there were a few key takeaways:
- If the weapon has a weak spot, someone will find it and leverage it against you.
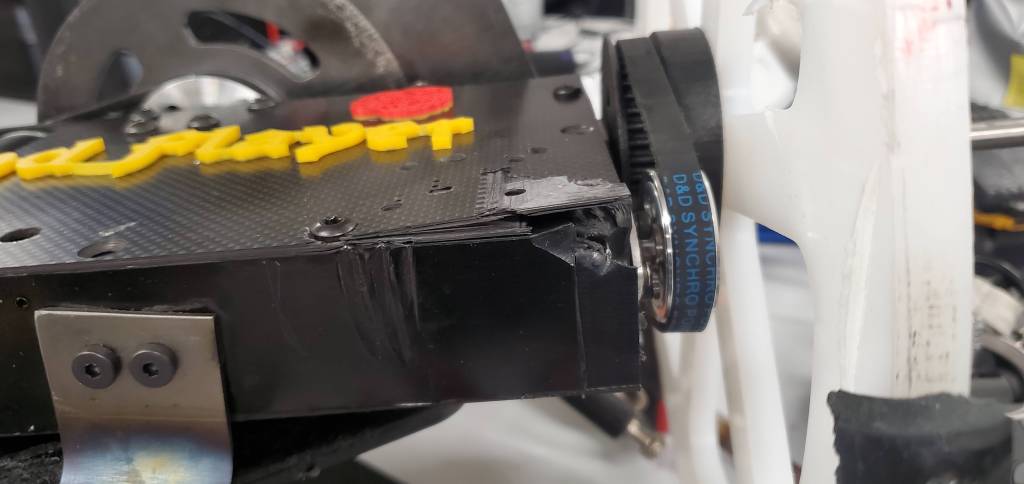
- Tegris is too stiff to absorb the energy against a strong horizontal like Maximizer. Since the Tegris doesn’t flex, it put all the shock in the pulley which
- Driving this robot is a huge pain in the butt. The gyroscopic forces require more thought than a mind in the middle of combat can spare so you end up fighting the robot itself more than the opponent. As a control-focused driver this is incredibly frustrating in the middle of a fight.
Redesign
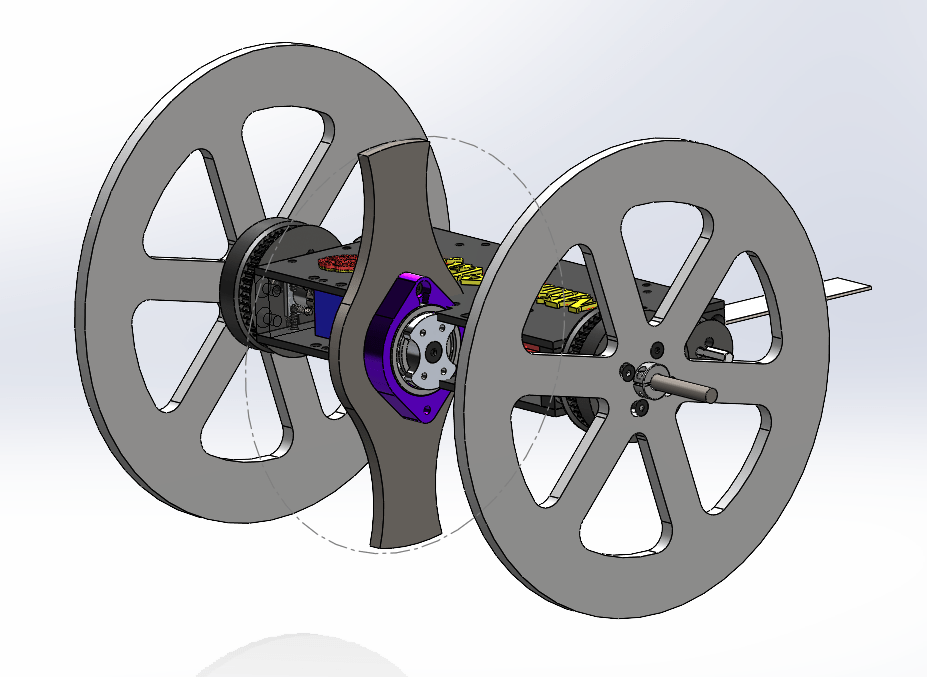
At this point in time I started thinking about other ideas for Mind Flayer to counter the gyroscopic forces. This was probably my favorite of them (and likely plan for 2025) though cost to machine all the fancy components was quite high so it was paused for now. The dual blades would serve as a way counter the other’s gyros though imperfectly. The blades’ power would go down a great deal (its ~1.5lb per bar) and the joined central shaft has a high risk of twisting itself but it is acceptable if something is learned. This robot is an entire exercise of leaning into the seemingly unreasonable so it makes sense. Originally this was supposed to be the end of Mind Flayer’s 2024, but then as Phenomenon’s hubmotor began to be developed I had another idea on what to do with this machine.
As a result of Phenomenon’s hubmotor development (read about it on its page) I wanted a way to try its development without having to risk damaging the main machine so Mind Flayer became a great test bed for it. Though it isn’t the exciting physics that this robot was founded upon, the name and role were open for use and easily fit the theme of the October NHRL as a Halloween machine.
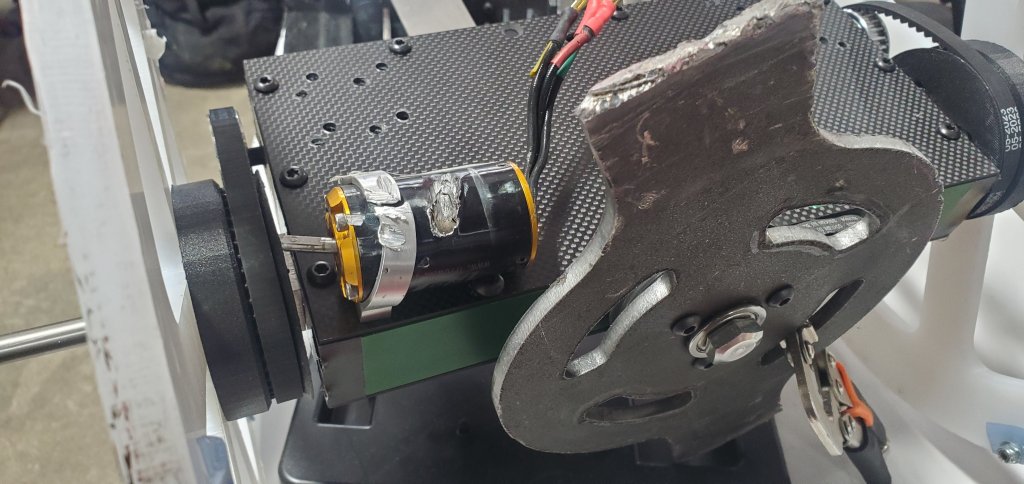
In almost no time at all a new Mind Flayer emerged based around the hubmotor. This hubmotor was weaker than Phenomenon’s actual hubmotor as this is only a Propdrive 4248 instead of the BadAss 4520. This change to a smaller motor makes it weaker but since this is a 12lber it has a chance. The switch to a hubmotor also requires a in-line mounting so the weird gyroscopic forces also go away for this version. Instead the emphasis will solely be on running the weapon.
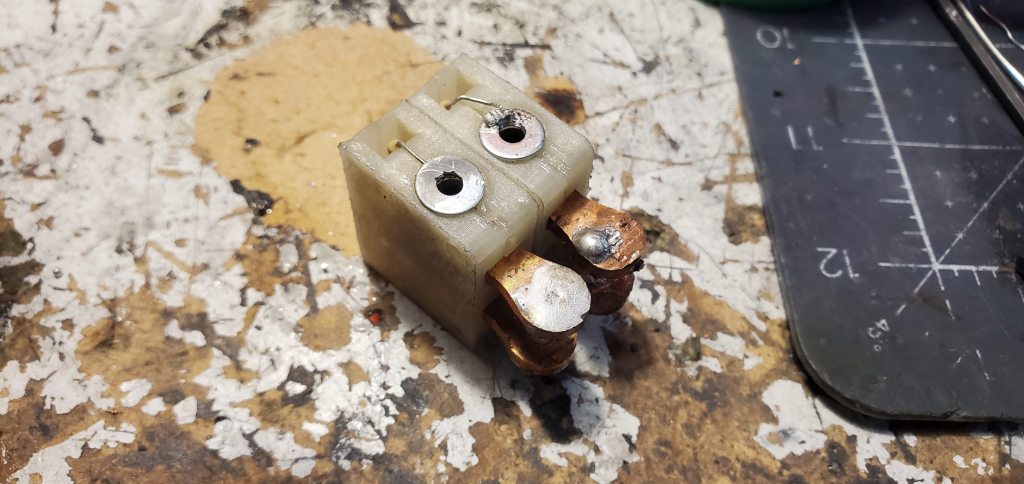
One of the new ideas to try was the use of the lashes on the outside of the weapon. Besides accenting the monster eyes, these would also work as passive keep-away elements. In theory these stiffer lashes would touch the body of the approaching robot to keep it from reaching the relatively weak top plates. It didn’t guarantee success, but once again it was a fun idea worth a try. Its also important to note that since the weapon is not mounted in-line with the drive that means that as the robot rotates over it adjusts the distance of the blade to the ground so if it is up to 1.5in as it drives forward then as the robot pitches forward it could reach as low as 0.5in from the ground. Its a neat feature but time will tell how effective that really is. Now that the background is set, its time to start building.






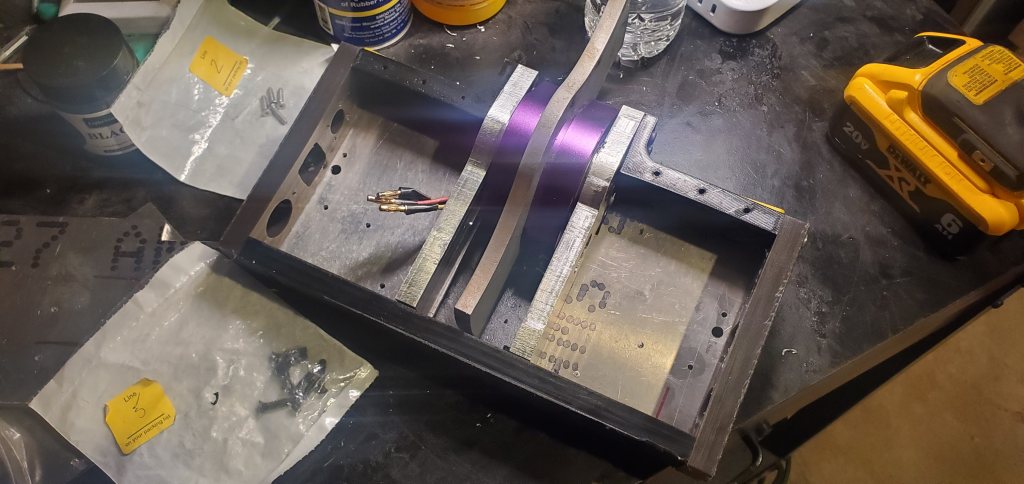
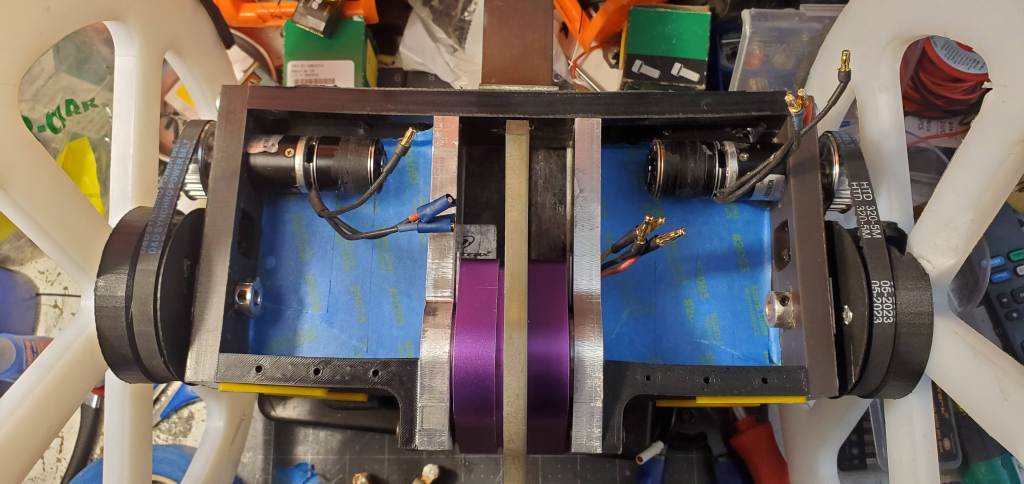
The shape of the robot was pretty straightforward. It was designed as two boxes joined at the center by the weapon assembly. Unlike other big wheel machines, this robot has a joined rear brace. The hubmotor is only connected by 10-32 threads in its endplates. The aluminum material is far weaker than a through-bolted shaft with a locknut on the end due to the steel having much better retainment properties. As a result, keeping back brace was critical to ensure the machine would not fall apart from any decent horizontal hitting it. This also has the connected side effect of limiting the blade’s diameter which is fine for a hubmotor as it limits the startup torque.




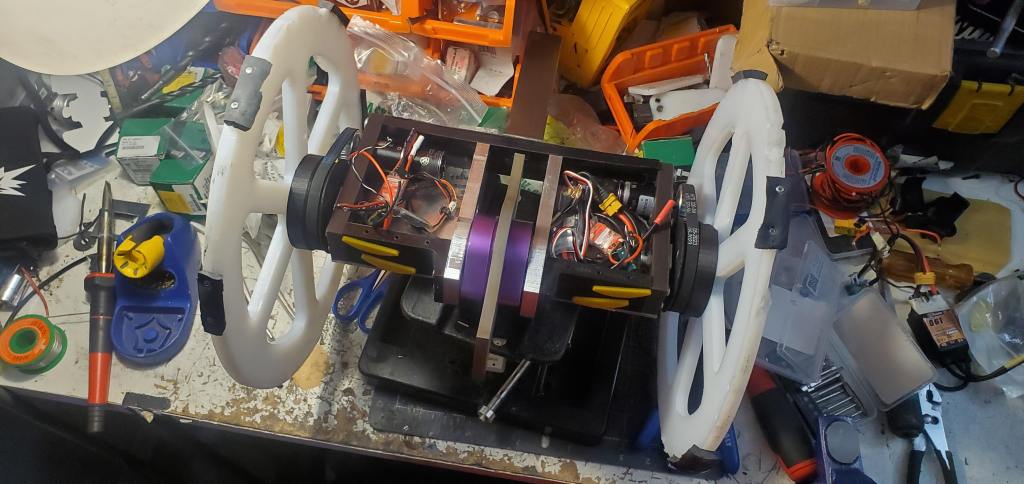


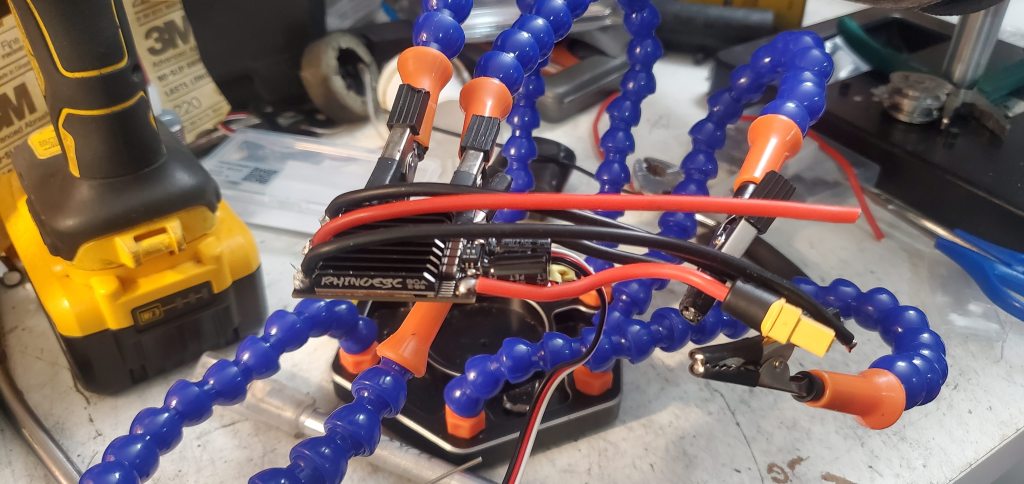


Building continues! It flew together pretty fast without much concern. One of the big improvements on the design of this robot as a whole was the utilization of both internal carbon fiber Nylon cages around the motors and the challenge of optimizing the design of the electronics itself. The first big change was rewiring the Rhino 80A AM32 ESC. Its not something I’m unfamiliar with as it happens to all of the robots at some level, but thanks to the shape of other machines I’ve been able to get away with stock orientations. Being able to think critically about all aspects of the components, even those that seem to be pretty straightforward, was a good mental exercise to begin thinking of other ways to package electronics. The Nylon cages were good too as both a retaining method and guard as the usual .04 clear polycarbonate I usually bend around the components proved insufficient in high impacts. By having a simple and straightforward cage none of these issues during impact were observed after fights.

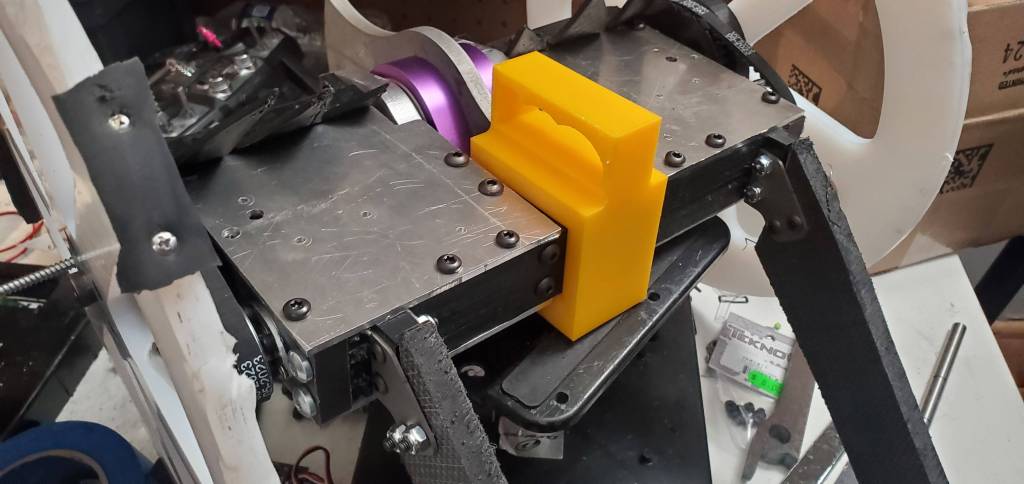




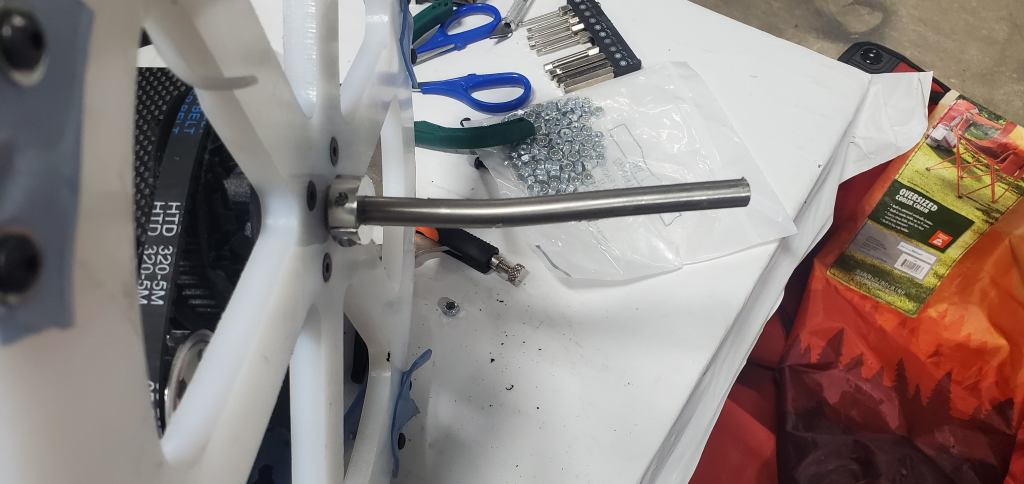
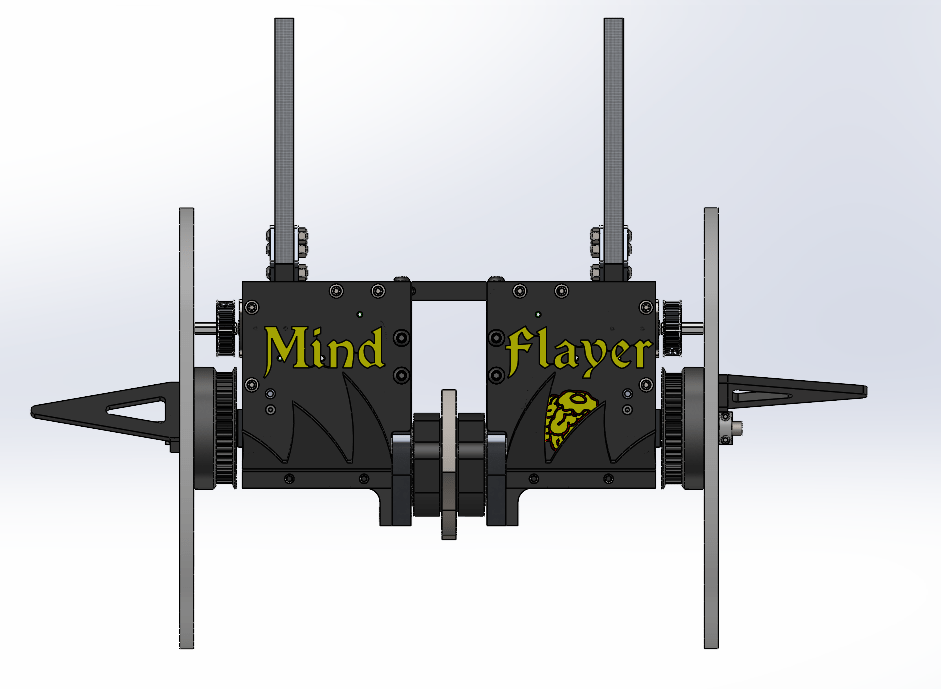
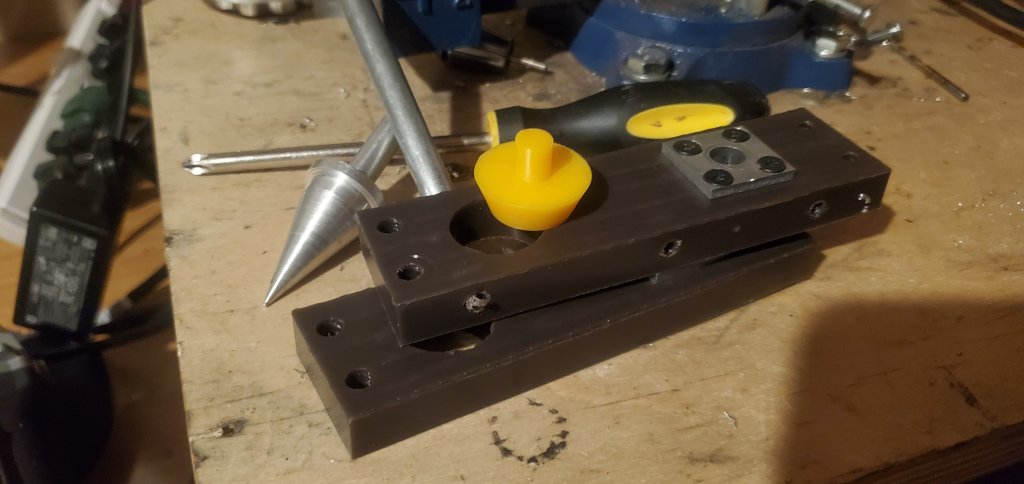
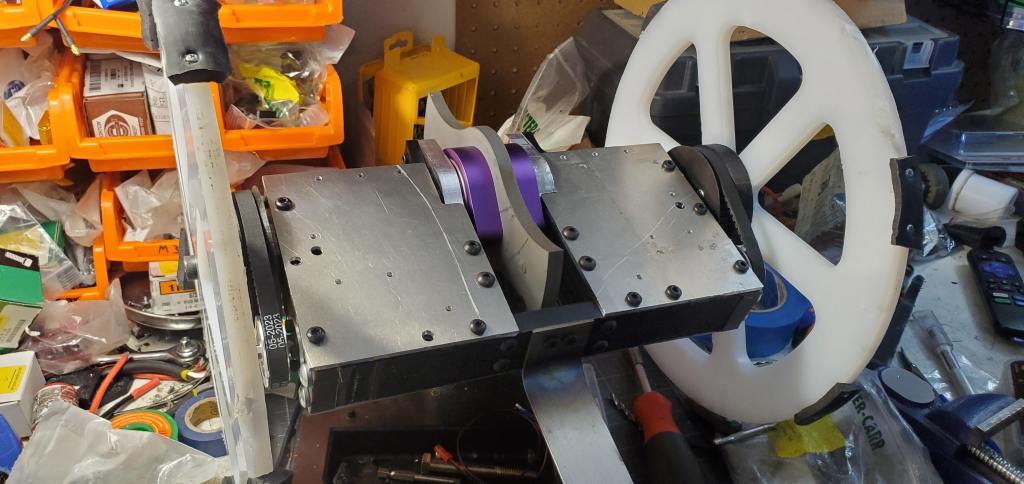
With the internals done it was time to finish out the rest of the machine! The lashes were printed from Duramic PLA+ then heat bent. These were surprisingly strong as they could support the entire machine when resting on a stand without breaking and held its shape very well. I attempted to attach bike tread tire to the wheel as well with zipties as a way to get better traction while also not adding too much weight. For safety I designed an integrated safety lock and robot handle. This was a very fun little experiment as it focused on the human side of engineering design work. The beauty of combat robots is that there is the freedom to implement artistic touches to a full design but alongside that is also the challenge of considering the entire life of the machine. One of the underrated parts of that is the life of the machine outside the box and how you carry it around so thinking about that in how both safety and travel can be combined into one tool was another fun aspect of robot design that I did have to consider before but now that a unique issue in Mind Flayer is raised it pushes me out of my initial assumptions and demands a more creative solution. Its always the little things that make it all fun.
October NHRL


You can read about the event here. The key takeaways were this:
- Hubmotors are very sensitive to stall conditions. In both testing and in the fight against Mareep the weapon’s greatest issue was burning itself up. This was fairly expected with the weaker motor but it was important to keep in mind with Phenomenon as it went into the NHRL Finals.
- The general chassis design and process of Mind Flayer has potential. While there is a need to through-bolt the hubmotor for front rigidity, it is nice to have a machine that completely negates the need to play ground game. After working so hard on optimizing this on the 30lbers it is good to have a machine that is deceptively simple.
- In order to be an effective big wheeled machine, it needs to be the size of one. By being smaller than Grandeur (as seen in the picture above) it means if the two were ever to fight there is little to no defense against it. Even normal vertical spinners can strike the chassis if maneuvered incorrectly so it would require either more armor or a larger reach to avoid such impacts. This isn’t an issue with the weird version due to its blades acting as defensive shields as well as points of aggression.
In conclusion, Mind Flayer is a weird robot that started with the notion of being unafraid to try a crazy idea and see where it leads you and in the process of chasing that strange goal other lessons were learned that informed the design of other machines far more than expected. Its a weird concept that will have to be refined in the background as its development requires more time and cost compared to other machines but it will return in the future at some point.
Make sure to check around the rest of the site for other machines’ reviews and event recaps!
