
2024 was quite the year for the old little machine that is Cattywampus. This was the year where this typically Sportsman-focused design got a very prolonged chance to prove itself in Full Combat.


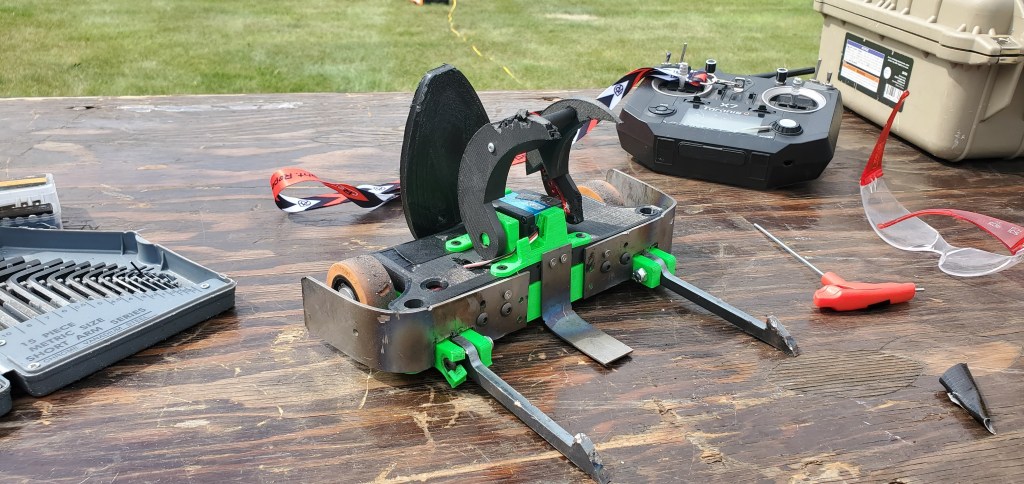
In case you’re new to Cattywampus, the general idea is the robot is able to throw itself around by using the tail to rotate itself. This year, in addition to the tail, a clamping jaw was added to seize the opponent and force them to tumble too in the same way that an alligator or crocodile death rolls. There were three main benefits for this design:
- There is no hard stop for the weapon. When this design was initially conceived, there was an idea to have the arm be a normal lifter that sits inside the robot. The issue with this is the gearmotor used to drive it will want to keep rotating the same way a drivetrain does with a wheel but a lifter’s limited range (generally within 180 degrees) if you look at Gruff from Battlebots in the image below you will see that the arm has an endstop in the back to limit its range. That bright yellow cord in the middle of the machine is a Nylon strap used to absorb some shock to avoid straining the gears. Unfortunately in a 3lb machine there isn’t much weight to have a sufficient shock absorbing system for that so having no stop removes that issue entirely.

2. The tail is at the back of the machine. By having the tail all the way in the back, it should be harder for most machines to get to it. While most lifting arms have to use a leading edge at the front of the machine to catch an edge, the entire machine and its much stronger forks become the leading edge while the flipping is mostly defended.
3. The entire machine can be moved with the tail. Most robots are fairly helpless as soon as the wheels are removed from the ground with the few exceptions of machines who have other components such as lifters that could affect beyond the robot’s chassis. Catty’s tail is well beyond the space of the normal chassis so in most situations the robot is actually able to move itself with the tail to escape pins or other control-based actions of the opponent. The downside of this is the tail must be reset to vertical after every launch as the tail could inadvertently high-center the robot itself if it is still down (this is foreshadowing).
The tail itself is a cam shape (the radius of this changes across the length of the part) to gradually accelerate the motor. In the previous versions it used a rectangular shape which would maximize the impulse of the impact, but also put incredible shock back on the gearboxes. This cam shape gradually accelerates the robot, spreading the work over a greater distance and minimizes the shock while also increasing the amount of energy put into throwing the robot.
GSCRL June Jumble 2024
Cattywampus had a fun time at GSCRL June Jumble which you can read about here.
There were two key takeaways from this machine:
- The shape of the machine is excellent for control. It is heavily inspired from MegatRon where the forks did an excellent job corralling the smaller spinners and ensuring I could choose the moments where I needed to.
- The flipping mechanism was a glass cannon. The robot could corral fairly easily but it took great patience to keep the head and the tail from death. The head could easily be destroyed by the hardened steel weapons so I had to be very careful with where I grab. The tail was great at flipping but the moment a machine was able to strike the base where the gearbox was it immediately seized up as the gears inside were damaged. It only took one good hit to kill it so it took a lot of patient driving to ensure it was never struck.
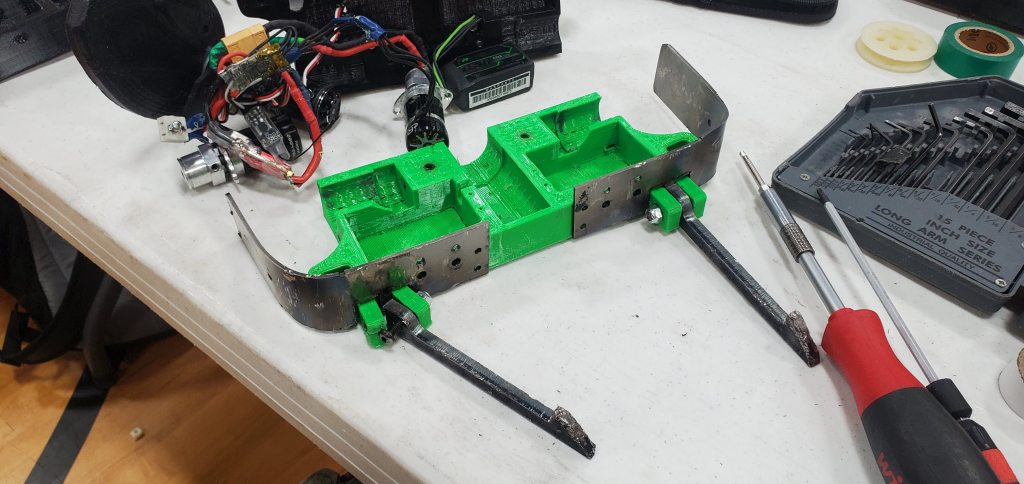
- The TPU chassis was too compliant. The whole chassis is TPU which is excellent acting like rubber which means the whole thing can move and flex. While some key reinforcements like the mounting plates keep the motors in the right locations, the outrunner motor‘s outer body kept rubbing into parts of the chassis. For the drive motors this means they can move around inside the machine and either gum themselves up with TPU or they can flex into their own wires and interfere with their drive. As a result, Catty has lost drive not from direct damage but from the robot pulling on its own systems and wearing down its own wires.
That being said, Cattywampus was still in good enough shape with a incredible record overall so I was more keen to try little changes first before I tried the bigger changes.
Upgrades
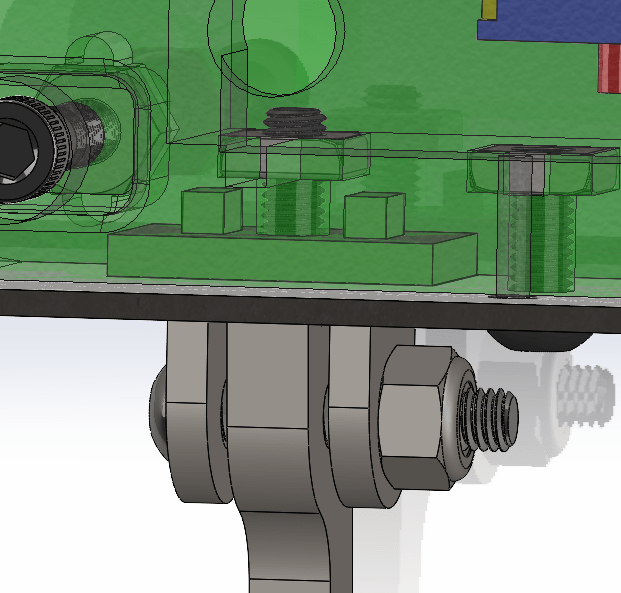



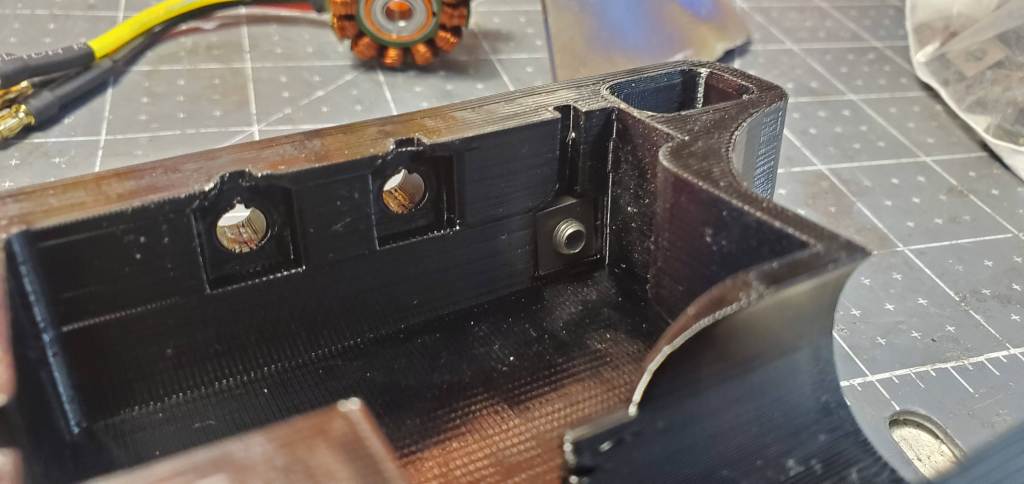

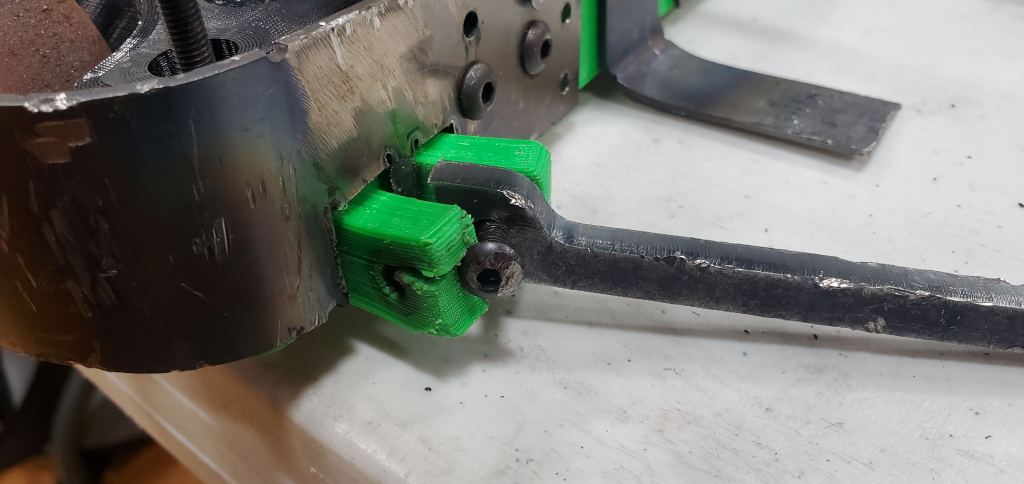
The biggest change for the next event was to try out AR500 steel fork mounts. The big failure noticed at GSCRL was the TPU fork mount failing. Not only could the mount flex on high impacts which allowed the fork to sometimes get stuck bent up or down which messed up the machine. In addition, the layer lines failed and the steel bolt came through which nearly resulted in a fork being torn out. For a machine that lives and dies by the fork it was critical to have a hard surface that could contain the fork’s motion yet still utilize the chassis’ excellent energy absorption properties. As a balance of the two, the mounts were keyed into the chassis to create local hardness when needed while allowing the rest of the chassis to flex as needed.
Battle in the Burg 2024




You can read about the event here. Cattywampus had a much less successful time here due to the 3-way fight style allowing the other machines to readily attack the tail as it attacked the other. This led to much of Catty’s fighting here being incredibly defensive. In the wake of this unorthodox test, two key lessons were learned:
- The tail must be made from better material. While the Nylon tail was cool, it was ultimately too brittle as it cracked once struck. Something more resilient like UHMW would be better especially with its increased stiffness.
- The steel fork mount was incredibly effective. While the robot took a beating, the forks kept the biggest damage away from the critical components and allowed for some resistance. The chassis seems no worse for wear so it should be ready to bring to the next event.



After the event there weren’t many readily apparent issues to deal with so it was mostly about tuning the tail. After machining UHMW tails, I considered adding a TPU cover to the tail. In the same way Maximizer has used TPU hubs over its wheels, so this would create a crumple zone and prevent the gearbox from experiencing the peak loading of an opponent’s weapon impact and spare the gears. Unfortunately, I couldn’t squish the robot down enough to get the extra weight out of it (that extra 0.6oz is the weight of the cover) so that will have to wait for another time.
NHRL October 2024
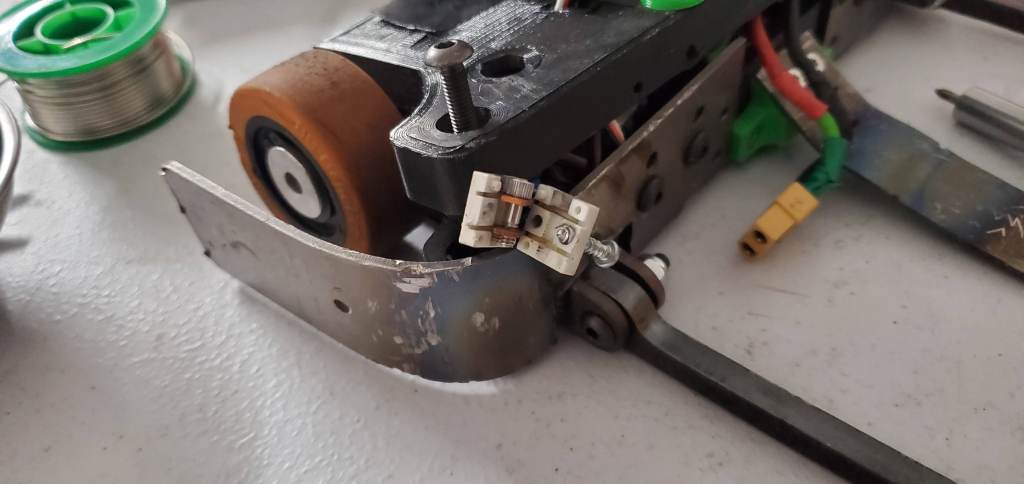
You can read about the event here. Cattywampus had a rough time at NHRL but not because of heavy damage. Upon arrival I found the Fingertech switch was damaged from the last event so it had to be replaced. Fortunately it was caught early so it wasn’t a real concern. Here were the key takeaways:
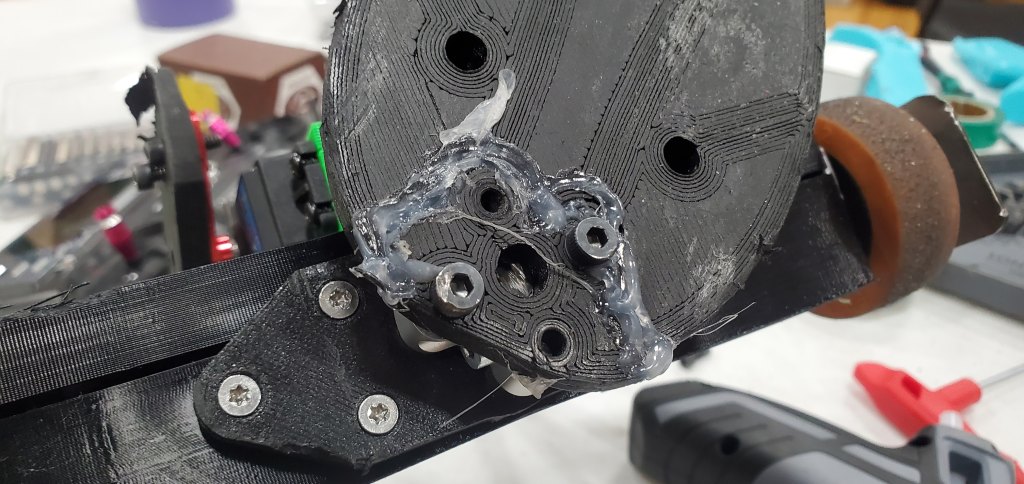
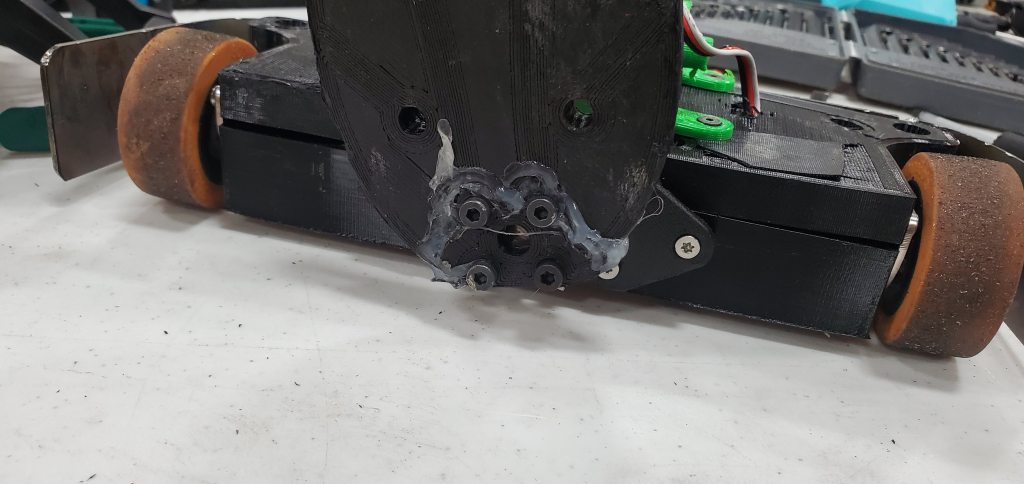
- The wires again proved to be a weakness as it appears the wires were pulled off of the ESC tabs which helped kill the ESCs (they were still receiving power and after the fight I round it totally unresponsive). The chassis flex likely didn’t help it but its also worth adding a bit more solder next time anyway.
- The UHMW tail was too stiff. Though it was very resilient and took hits like a champ, more shock was likely sent to the flipper gearbox which killed it prematurely. For now its better to have the tail be more resilient than less but it does pose a challenge on protecting the gearbox better.
After the October NHRL there wasn’t much time to improve on these as Catty had to turn around at compete at Robot Ruckus! The damaged parts were re-printed, the electronics were resoldered and the machine was set aside as work was placed on Phenomena for the next two weeks.
Robot Ruckus 2024




You can read the event report here. Cattywampus once again had a difficult record, but the machine never failed to bring smiles to people’s faces. In fact, you can watch a video by David Ritland where I discuss the machine with him. Here were the key takeaways:
- The rear location of the tail makes actual flipping rather difficult. Since the tail is the farthest away from the other robot and only flips from one point it means it more “tilts” forward. This is somewhat diminished with the head grabbing the other machine so the other machine doesn’t flop away, but with the head off in this scenario it at best could tip the other machine over a little more than a lifter but ultimately this led to Catty being inverted more often than not which wasted time for it to self-right.
- The tail resetting would be excellent. While tricky given the tight weight and space constraints, a few seconds always had to be given to resetting the arm which always wasted time and precious focus to do properly.
- The tab geometry for the fork mounts needs to be slightly better. The unintended consequence of the forks was the relatively small cross-section of the mount which allowed it to be torn out which proved to be an issue. Though it’s hard to say if that was an effect of travelling or not, it was an issue nonetheless and will have to be remembered for any bot that uses them in the future (which is likely since they were so good).
Final Thoughts
As strange as Cattywampus is, it is by far the most entertaining machine on the team and incredibly important. With meta bots like Vorion and Phenomena it becomes incredibly easy to think of combat robots in a very narrow viewpoint. Cattywampus challenges that and forces me to be more dynamic in my thinking. Now with the learnings from this past year, it is clear that Cattywampus’ growth will be even more insane as all these upgrades need to be added. I expect a great deal of trial and error before a new version returns to competition but so long as the heart and soul is maintained in the new version then it’s okay to accept the potential failures.
