
Alongside the NHRL Teams event on Saturday, June 1 it turns out GSCRL was hosting a 2-day event where all beetleweight robots would compete on Sunday, June 2! Since 1) the NHRL Teams event was a one-day event and 2) New Jersey is on the way home from Connecticut to Maryland it made perfect sense to attend! With this in mind I debated what machine to bring but ultimately settled on Cattywampus as this machine is not only a delight for all who see it but a concept that desperately needs more time to be developed. You can watch the fights here. With that in mind, time to get it going!
Pre-Jumble Prep
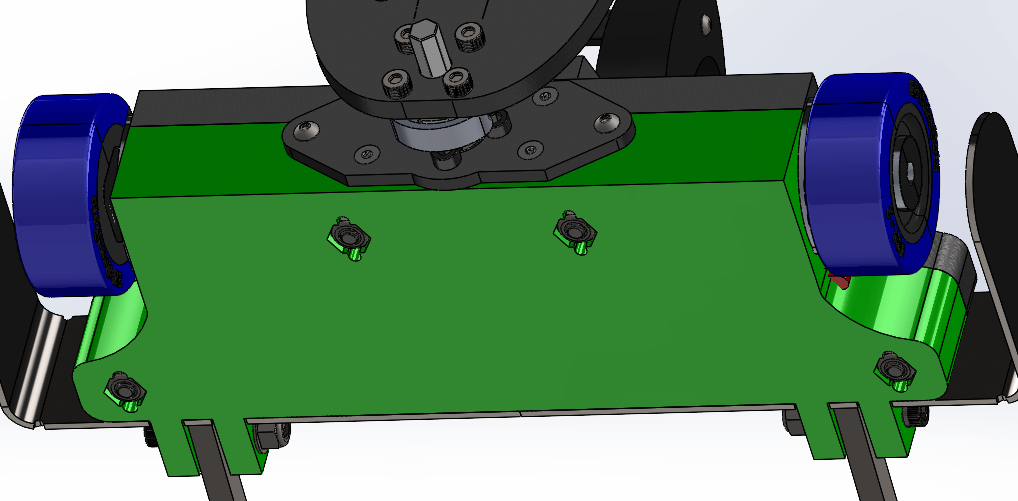
The chassis was mainly designed around the larger 10-32 hardware leftover from the 30lb & 12lb machines so much of the chassis is very low on quantity on hardware but doesn’t lack strength. I also added a keying feature between the top and bottom to help when assembling the chassis pieces.

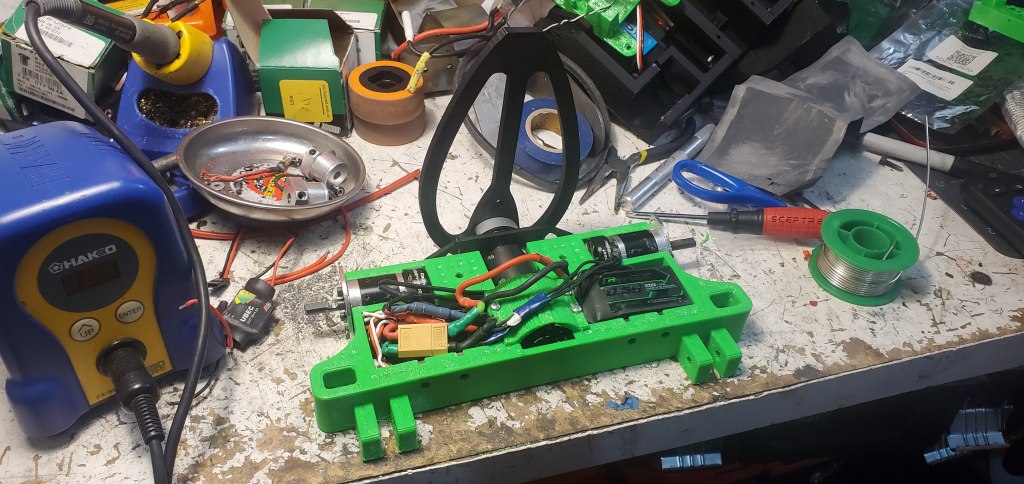





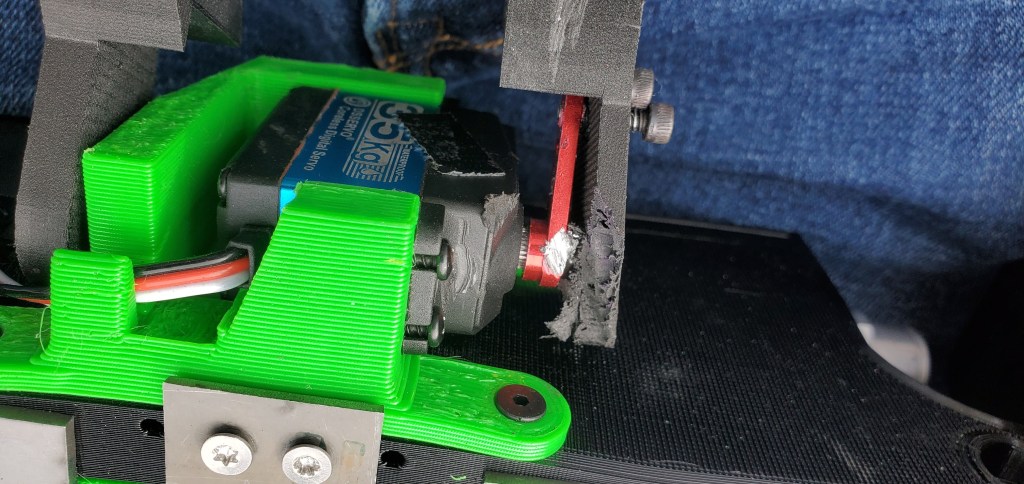
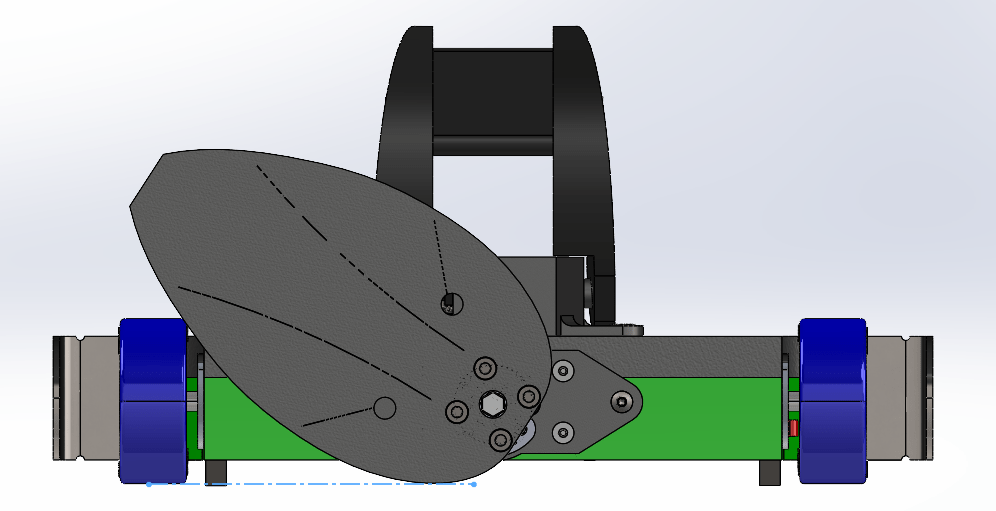
The base of the machine was very similar to the previous versions where its essentially a 2-part clamp where all components fit within cutouts then hard held down by the top. By directly lifting components from the previous Cattywampus it flew together. The main change was switching to the (now discontinued) Repeat Ultra gearmotor to power the arm. The tail was the first version of the “cam” shape, but ultimately required more refining. The 1/4″ AR500 forks came from Planeform who also sponsored Vorion for the Teams event.

Initial testing of the idea was fair, but not ridiculous. For now the ability to hold onto the opponent and ensure they go along for the ride was a huge improvement over previous versions.

In testing for the event it was taken down with Vorion to the Hive where it did a little dance! Great as it was, it’s clear the extra length of wheel guards would have to be removed to not accidentally leave an opening.
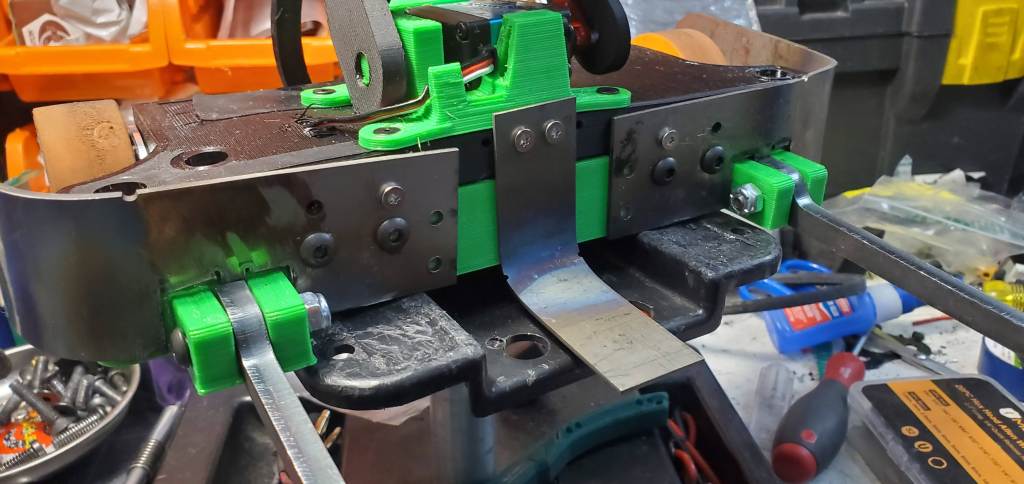

The Ti tongue was also leftover from another previous beetleweight and allowed anything smaller than the width of the two forks to still be grabbed by the head. Its smaller length allowed it to be defended by the longer, stronger forks.
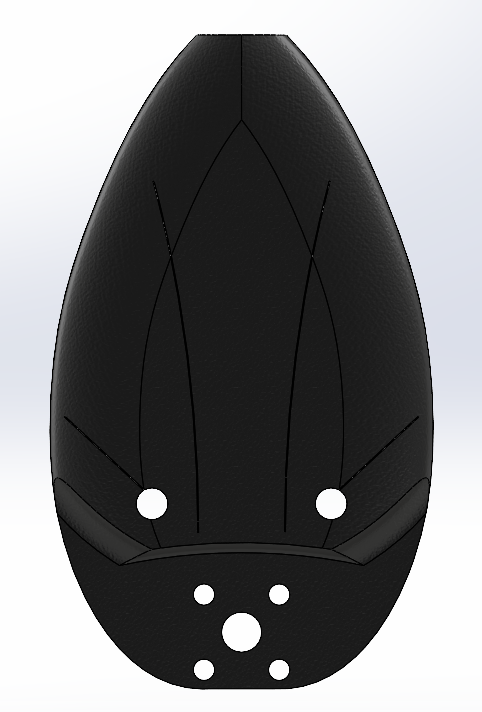
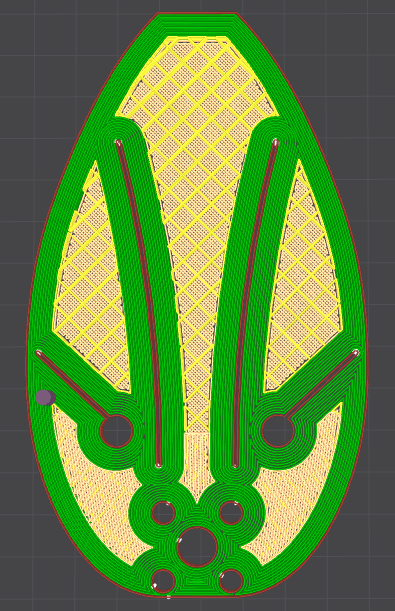
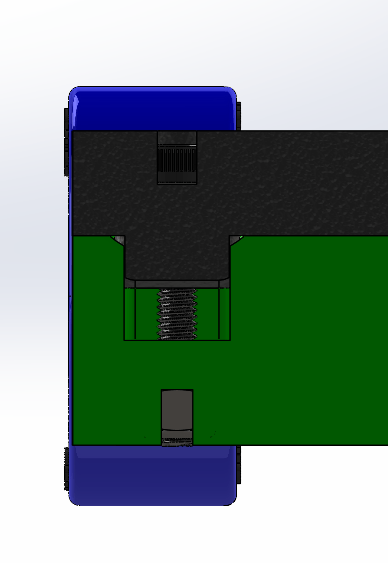
Most of the design of Cattywampus came together quickly using components of old machines, but the one area that did receive a large amount of thought was the tail. The shape of the tail is a cam which would transfer the torque from the gearmotor to the ground without transferring too much shock to the gears. To make sure that the arm was as stiff as possible I used a trick of cutting very tiny slots into the parts (smaller than the nozzle resolution so <0.1mm diameter) which would create perimeters in the printer slicing software. Using this I was able to create internal supports which would ensure good stiffness even if some sections were damaged by spinners.
The Jumble






The event itself was great! Vorion joined Jubileu and Floor Letter Word on display and we pitted next to our friends Bot Barons with Prince and The Fool. You can see all of Cattywampus’s fights here which give you the best look at its progress. With a nice 3-2 record it was a great success!
Post-Event Reflection
The big learning was how effective the control was for this machine. Obviously this shape is one I enjoy greatly (just look at the Phenomenon/Vorion/Fracas shapes) but pairing that with the overhead jaws gives a phenomenal sense of dominance. Despite five fights the robot barely needed attention; the machine took little to no damage besides the fork mounting failing at a layer line after direct hits from Barcode.
There are also still a few learnings to go on this machine. The tail is still a ways from the full flipping potential which has always been the inherent weakness of this shape. It mainly tilts the machines forward instead of the full flip; most times where bots were flipped it was through shear random throwing of the arm.
Whenever the tail wasn’t centered, it created a difficulty for a side of drive so I had to carefully reposition it vertical again which were precious moments that (fortunately) no one took advantage of. This stands in direct contrast with a more narrow arm which is more generous on wheel range and allows for more acceleration time. but the high shock generated by its short time with the ground has caused pinion gears to slip on the motors in the gearboxes. Additionally, the cantilevered output on the shaft means any strike to the tail will damage the gearbox and seize the robot (as seen in its fight against Tokyo Drisk). Once again, a weakness that has plagued all versions and will require more work to figure out.
Though there are some inherent issues with the idea, Cattywampus at large did very good at this event and gives hope for newer 3lb versions to be made and gives some potential for scaling to larger weight classes.

Leave a comment