Phenomenon rides again to do some testing! This primarily focuses on the event, but more detail will be added to the Phenomenon page under 2024 later on for an even deeper dive into the methodology.
Watch the fight compilation video here!
After the June Teams event, it was clear Vorion did not have a very good time. Though there was nothing strictly wrong with the robot that held it back, I did already observe a change that ended up being magnified in the match against Pepe Silvia.
The pulley system is a very good and reliable method when the robot works properly, but there are some issues that have held it back:
1. If you can strike the V-belt paths on the hub it’s a very easy way to kill the blade.
2. The large cutout for the weapon motor creates a weak point in the frame rail where large lateral hits can tear it open. Most of the time this isn’t an issue as the big wedge resists horizontal spinners but since Pepe exists it can be considered an issue.
3. The internal space allocated to the weapon motor and weapon ESC alongside the rest of the electronics and right drive gearmotor make it very tight on the right side, allowing little room for padding or perhaps to pinch wires.
Hubmotor
With these thoughts in mind over the past year and designs for it already underway, I decided to implement a new hubmotor design based heavily off of friend and captain of Team Honey Cracked Zoe Lambert’s design. However, I did not want to simply hammer on one machine but to potentially get a second entry into the NHRL Finals at the end of the year so Phenomenon was brought back from retirement. Ideally it will stay active as a dual evolution with Vorion in the same way Silent Spring and Silent X have evolved. With that, on to the designing!
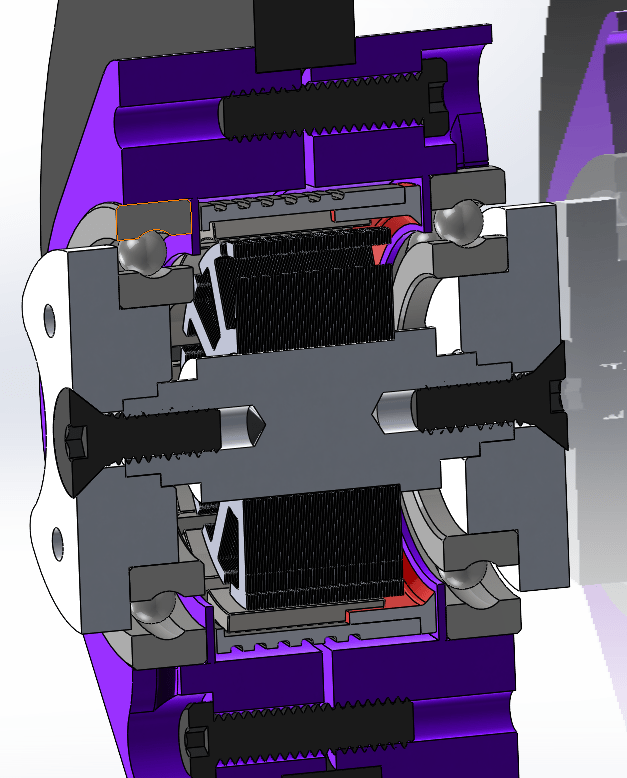
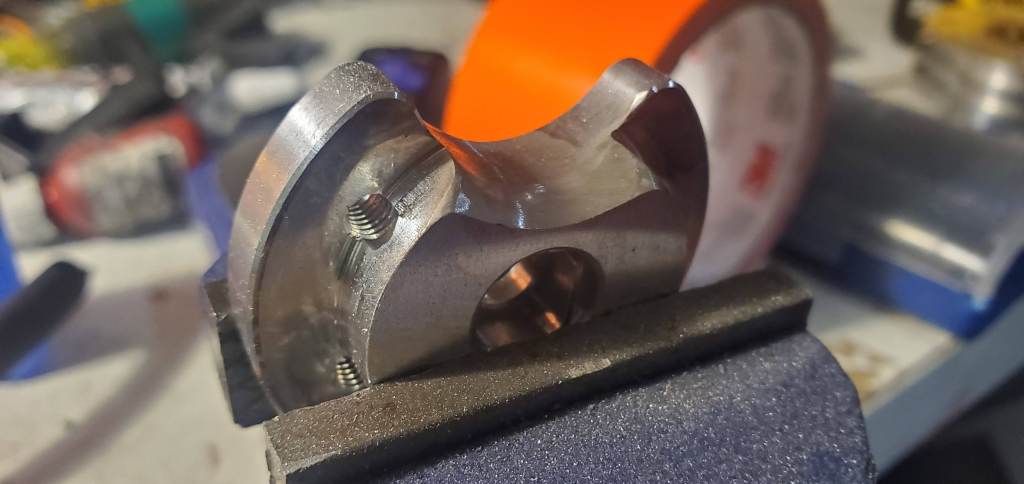
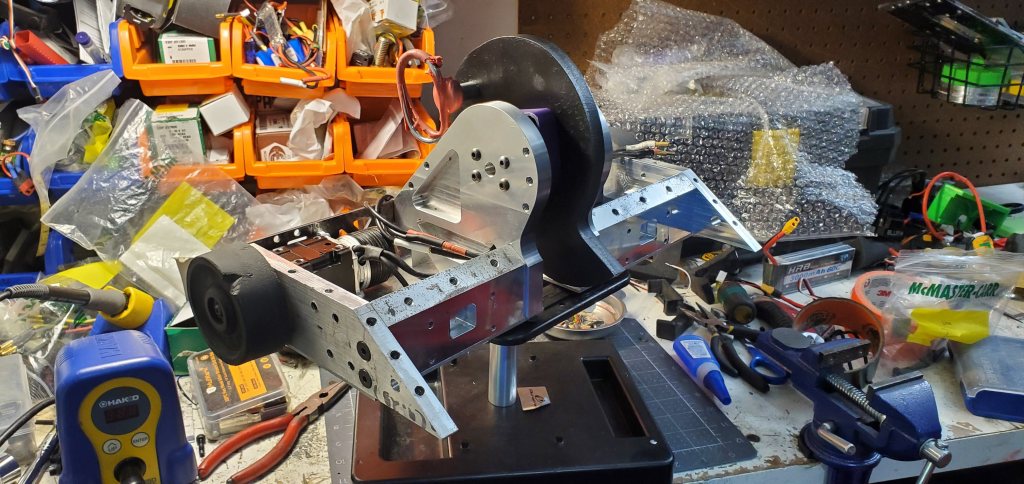
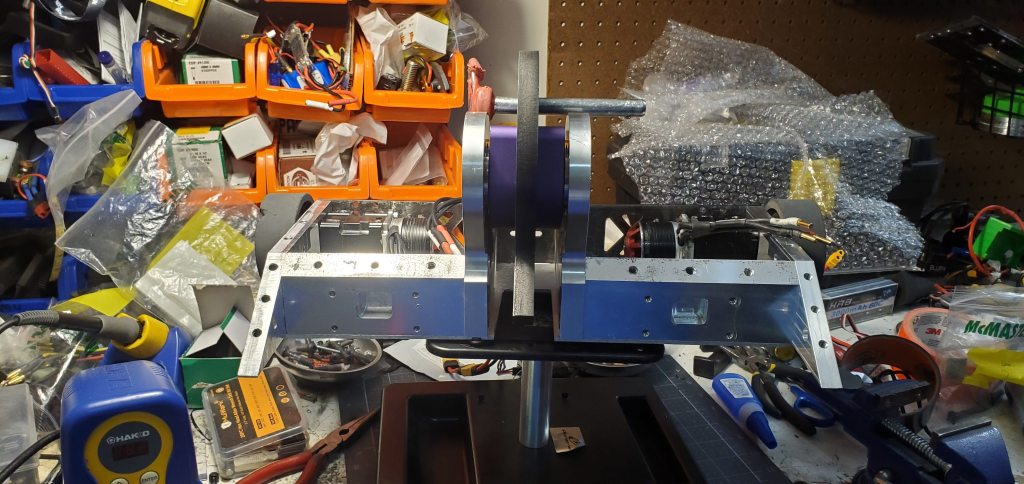
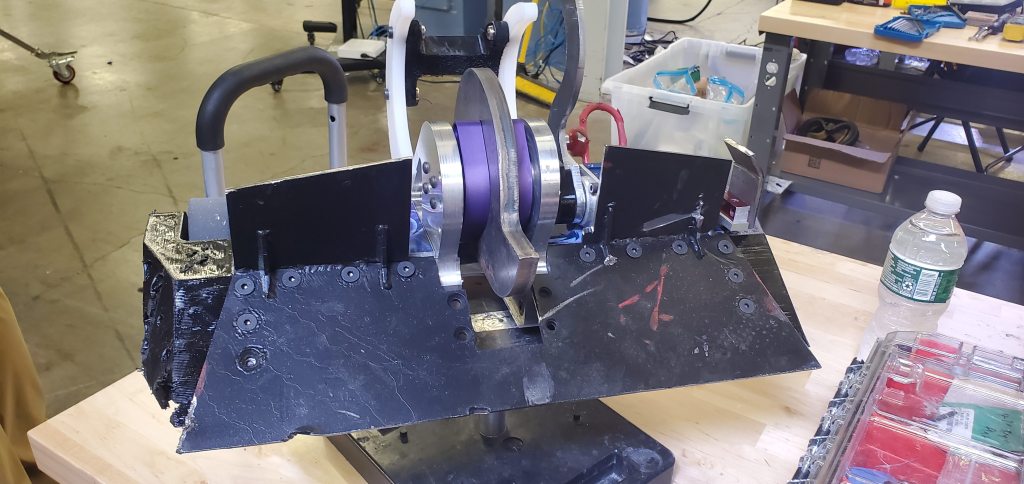
This is a cross-section of the hubmotor. The design is very symmetrical with only 3 unique parts: the center shaft, endcaps, and the main body (in purple). The part I really appreciate is the blade being positioned in the middle of the two bearings which spreads the load more equally. The current pulley hub design puts one bearing directly under the blade load which results in unequal loading and premature wear down on big hits. That being said, because the motor is directly in harm’s way instead of in the robot there’s a greater chance of a catastrophic failure. Only time will tell if it works well.

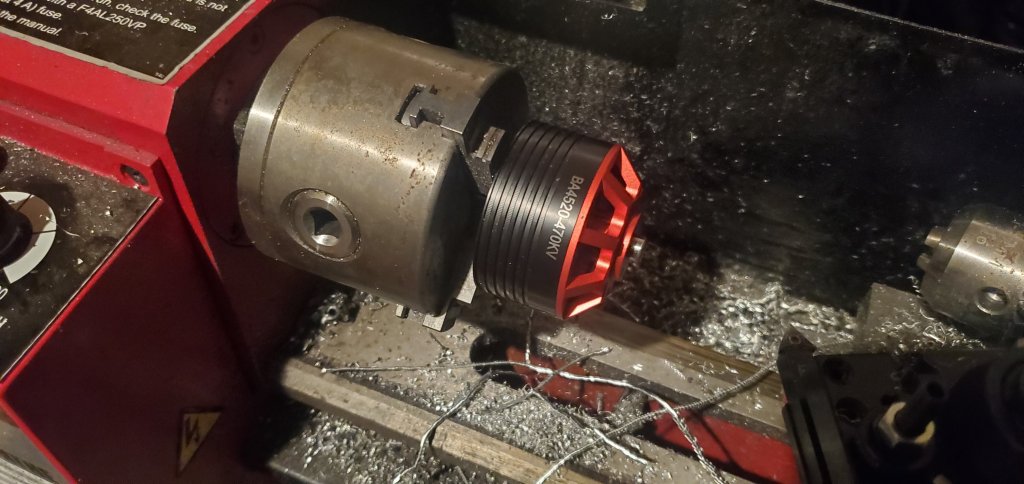



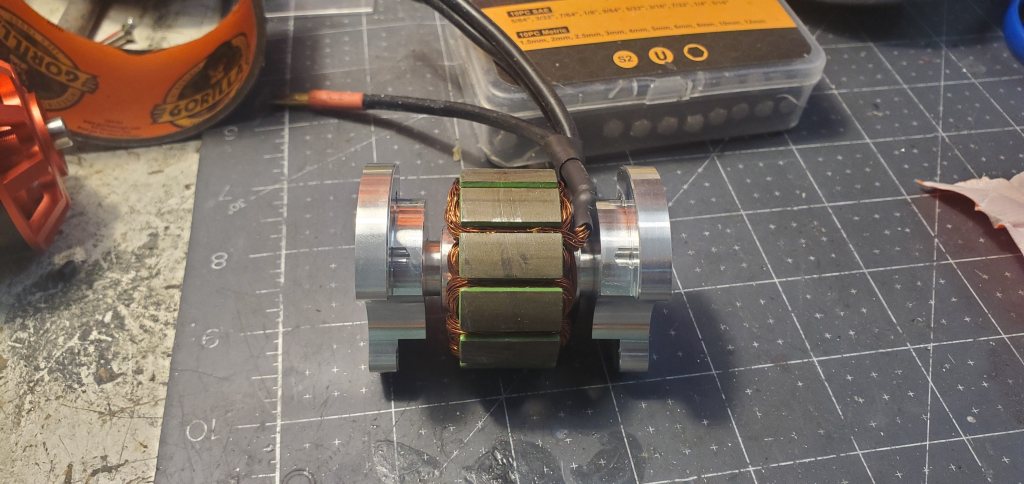


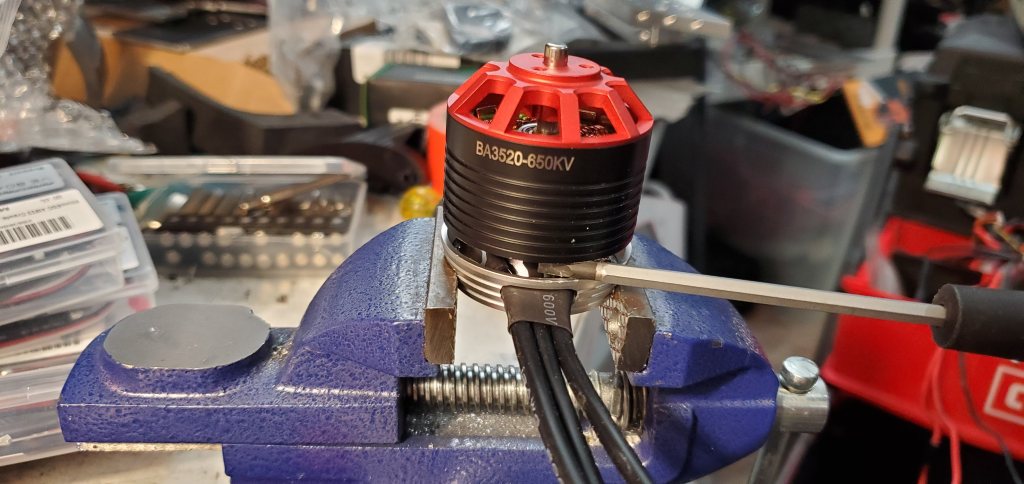
The BA4520-470kv served as the base of the hubmotor. The magnet gap on this line of motor is famous for being very tight so it was a bit of a gamble on durability if there is any flex in the system, but the wattage for the size was critical to get reliable blade startup. There was a bit of work preparing the motors to be used in the hubmotor (and modification of a few parts as the CAD model of stator had a different bore than what I designed around) but a little turning on the lathe and some sanding made everything fit very well.

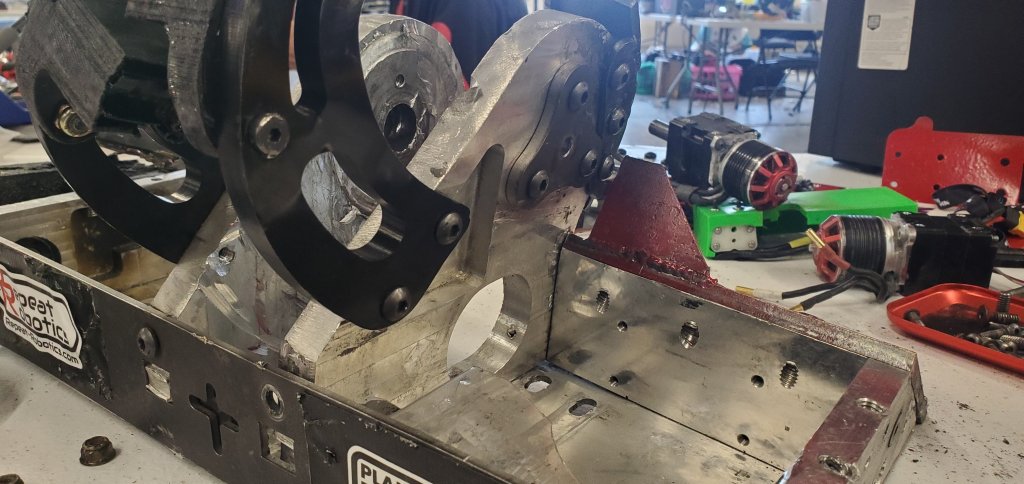
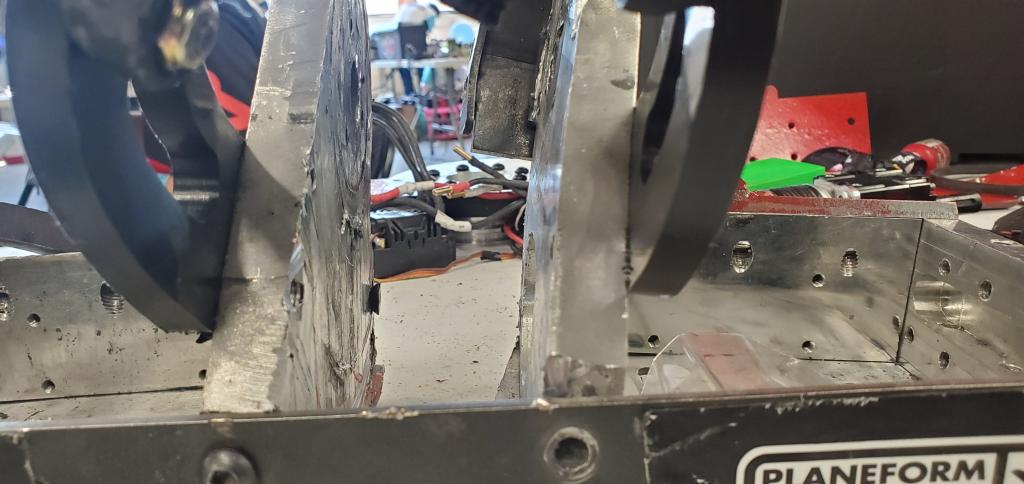
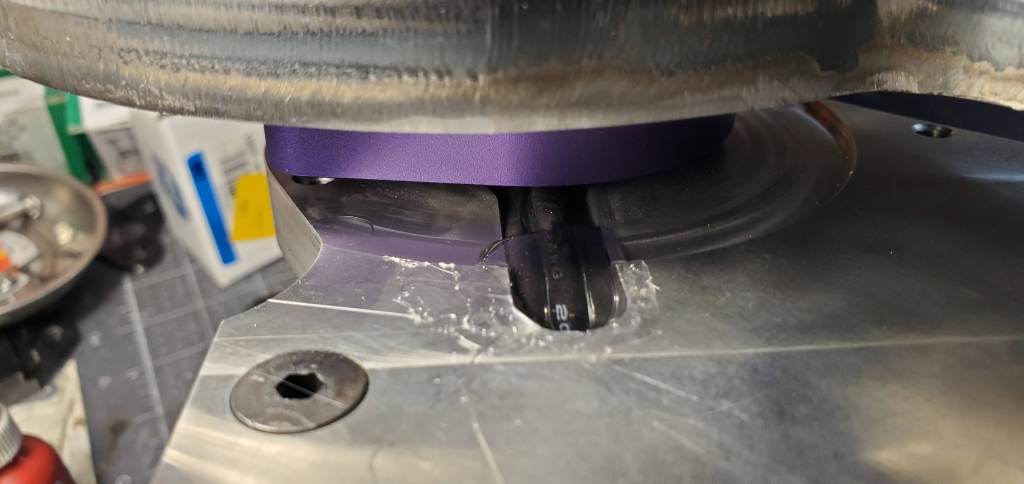
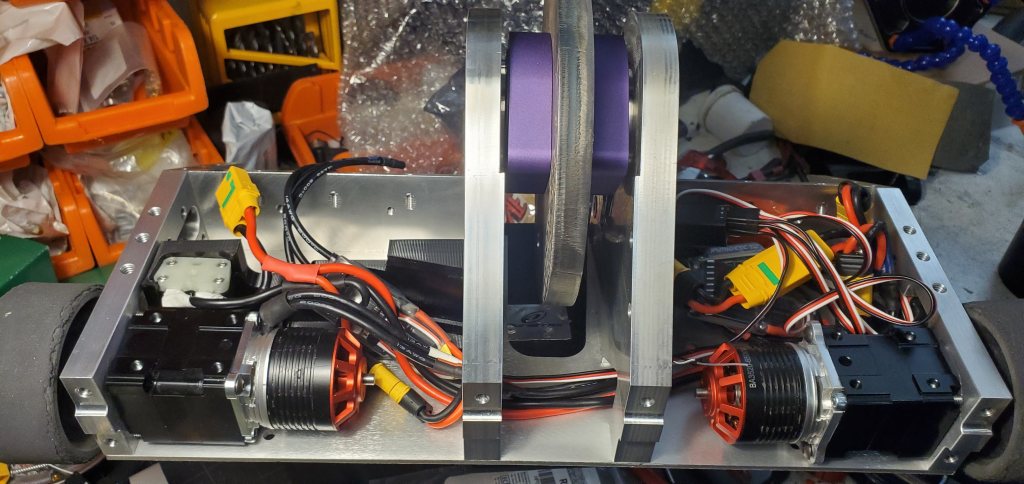
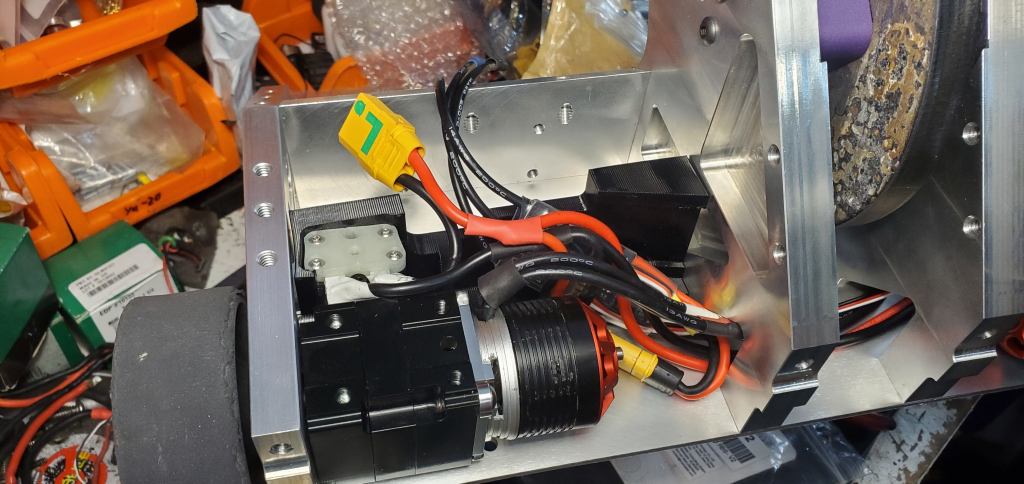
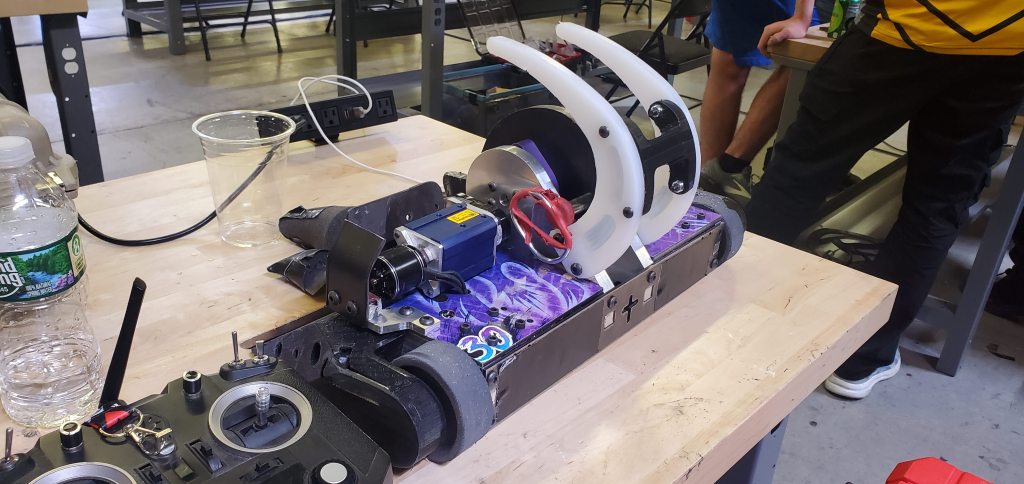
When assembled, you really get to appreciate the benefit of the compact hubmotor design. Not only does the frame rail avoid the large cutout from the motor, but the only output is the wires to the controller! In the words of Aaron Fan on the Skorpios Builder Blog on Sawblaze: “we plug it in and power goes in and torque comes out.”
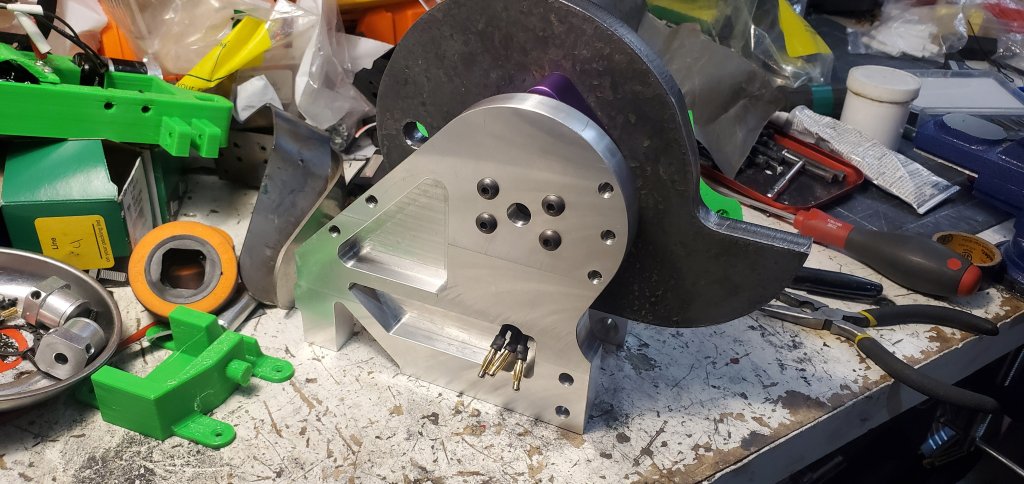
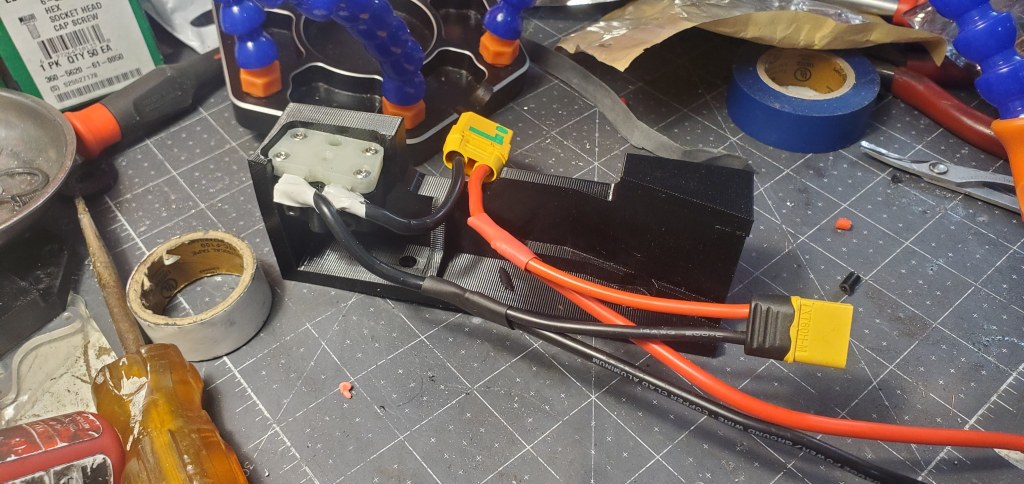
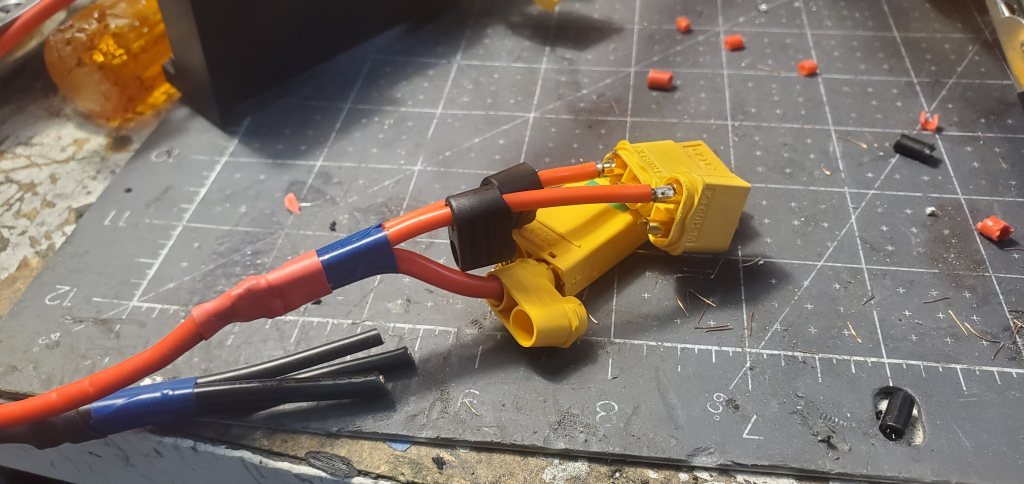
Bot 1 Prep
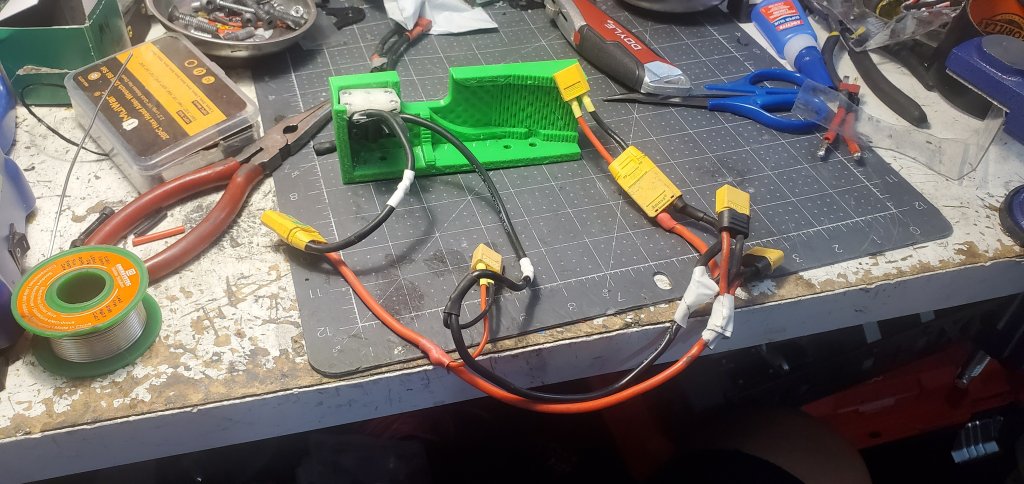
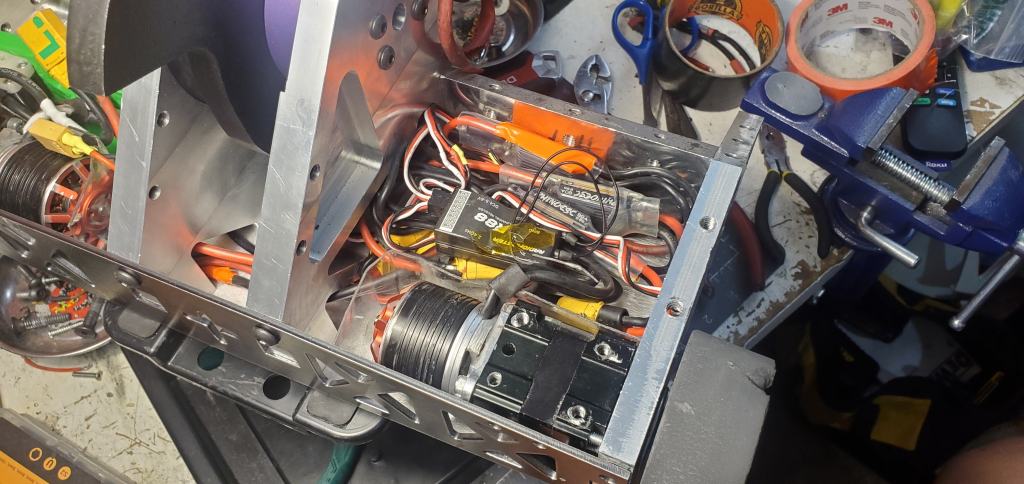


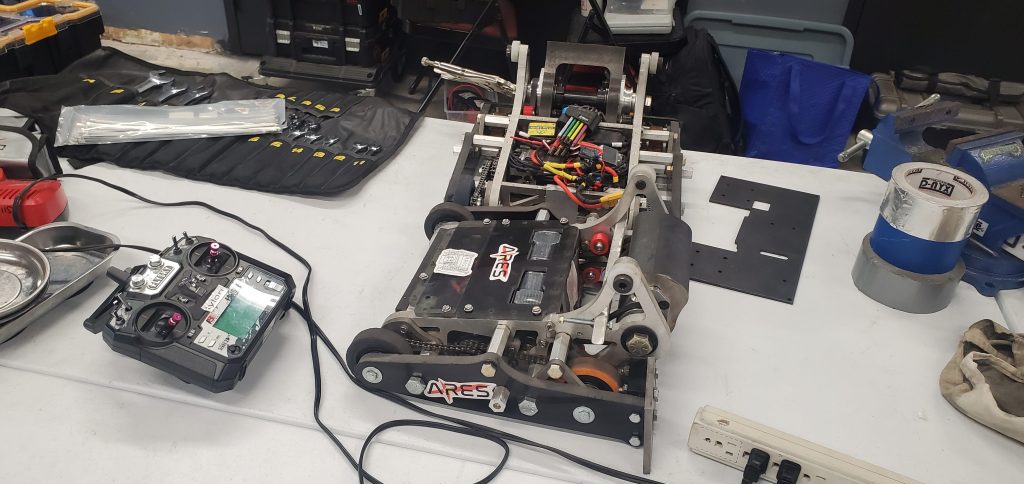
Assembly of the robot itself went by pretty smoothly (lots of practice) though even easier than normal due to not having to worry about pulley tension and having plenty of room for electronics. While I was at it I also re-made the wire harness to allow quicker serviceability. XT60s were used nominally except for the main weapon which used a XT90 adapted down to XT60 so Vorion’s larger weapon ESC could be used with the same system. Because the Rhino 80A ESC is the bread and butter for drive these days with its excellent responsiveness on AM32 and fairly small size all of the systems were controlled by them (even the weapon!). The hubmotor weapon should not exceed the current rating of the controller due to its lower kv and the Rhino’s excellent low end torque so I elected to make the entire system universal. This is phenomenal (ba-dum tss) for maintenance as I can both prepare many spares and/or switch in spares from other machines. The bot was then painted all black for testing (the liveries had not yet arrived) and driven down to the Hive!






Testing at the Hive went very well. Micah of Avalanche brought the V1 chassis of his machine while testing his newer one so it was a great test dummy. The hubmotor only ran for <1min due to not wanting to wear down the AR500 disks too much before competition (it was the next weekend). Even so, the point was made: it was lethal like the pulley version.
Clone Conundrum
Due to a Vorion being destroyed at Teams, there was now only two chassis around to build from. One is the Phenomenon we’ve been seeing above while the other is the Vorion at the end of Teams. I do not want to rework a fully functioning Vorion as if something were to happen between now and Finals there would at least be one fully functional machine. Also, it would be a pain to convert back after competition in case I need to do testing/decide to compete at a later event. At Finals last year there was a third machine (“Phenorion”) which could flip for either machine because the two were nearly identical. Because the hubmotor requires a change to the center of the chassis, it would be too difficult to pull the same trick so a spare would need to be made explicitly for Phenomenon and leave a Vorion at home.
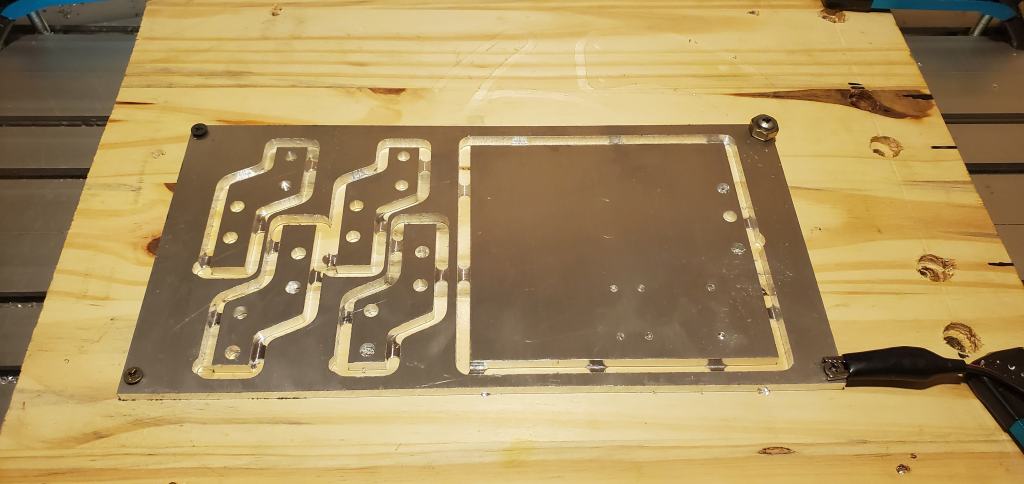
As soon as I was home from the Teams event I ordered a new set of chassis components from Planeform and PCBWay (not sponsored, but would love to be!) and waited. The Planeform parts arrvied quickly because they are local, but the PCBWay parts cut it way closer by arriving the Tuesday night before the event only allowing two days to make a whole second machine. Time for a speedrun!
Speedrun Session 1- Tuesday Night



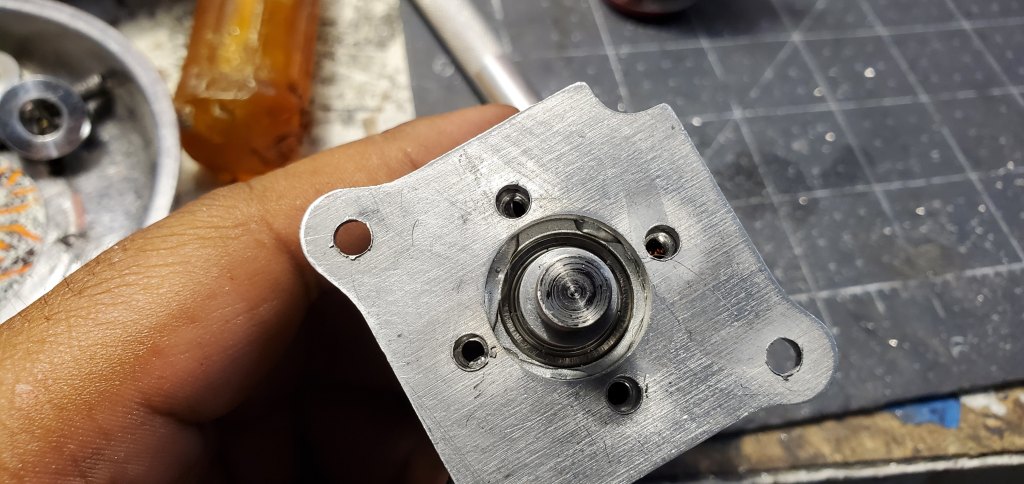



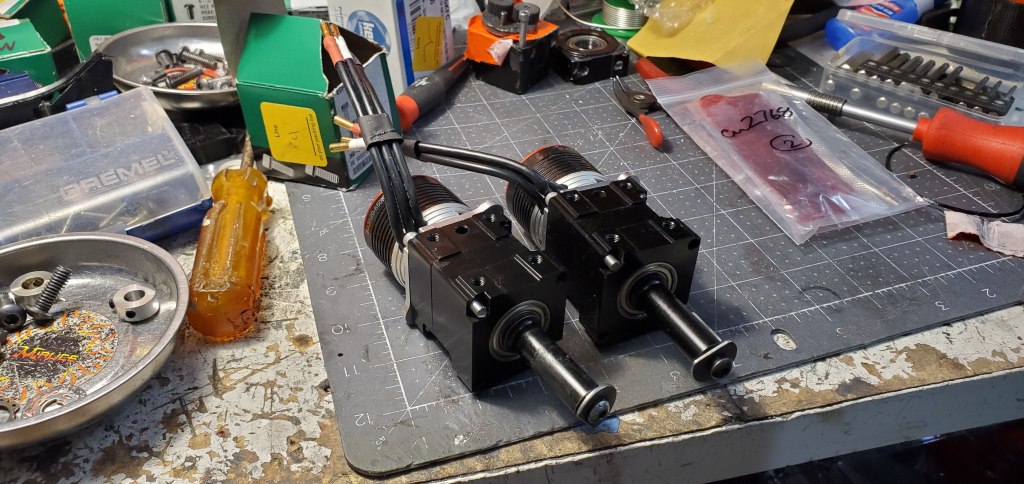
After assembling the hubmotor in the same manner as the first, a new pair of drive motors were whipped up. Custom shafts installed, mounting holes retapped to 6-32 and reinforced with E6000.
Speedrun Session 2-Wednesday Morning

The second session was also a long time as the wiring harness and controllers all had to be wired. The battery/Kake switch mount was printed overnight to maximize time. I woke up early before work to get as much done as possible before having to clock in. Around lunch I was able to flash the controllers and wire on the connectors.
Speedrun Session 3-Wednesday Night

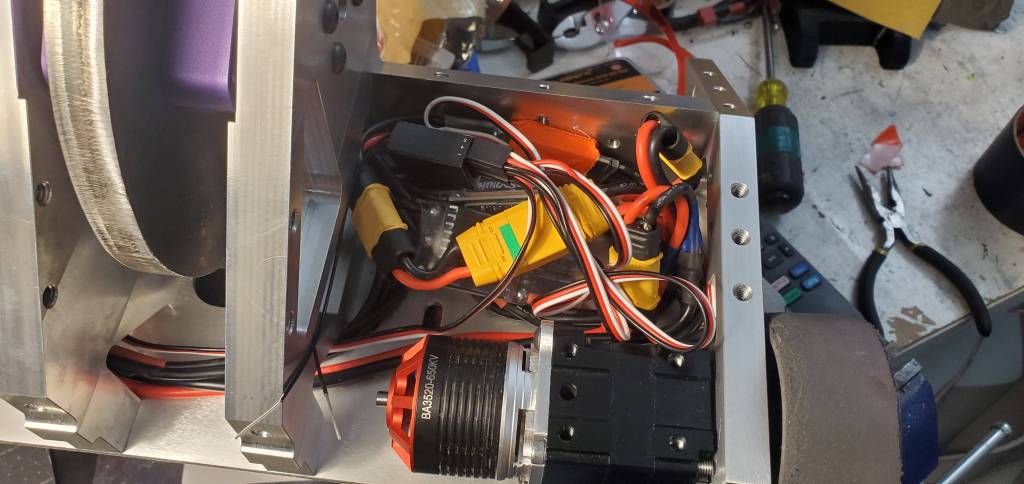

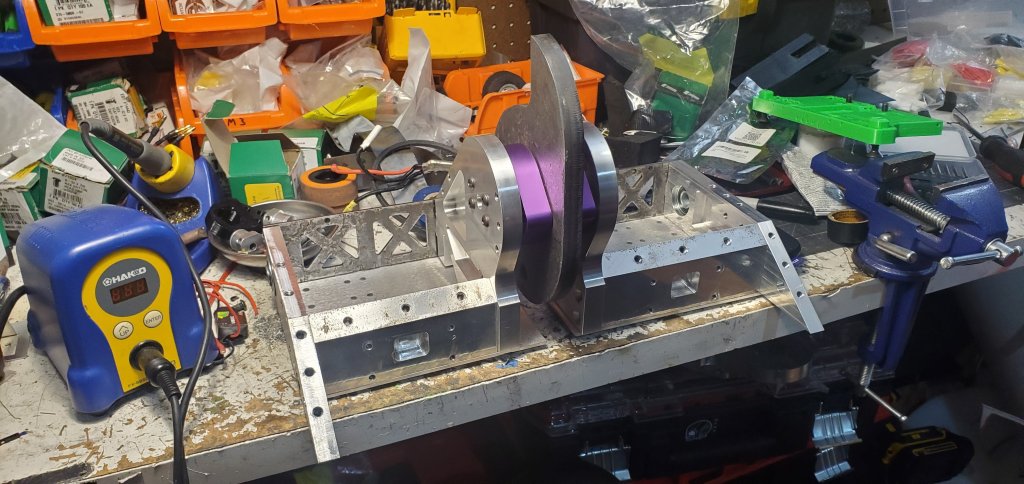
The support bearings for the gearboxes also arrived and were pressed in to the drive rails before assembling it. I then routed the electronics through the chassis pieces to ensure everything fit in its spot. The wedge of Vorion was then fitted and all the chassis pieces were fitted together.
Speedrun Session 4-Thursday Morning

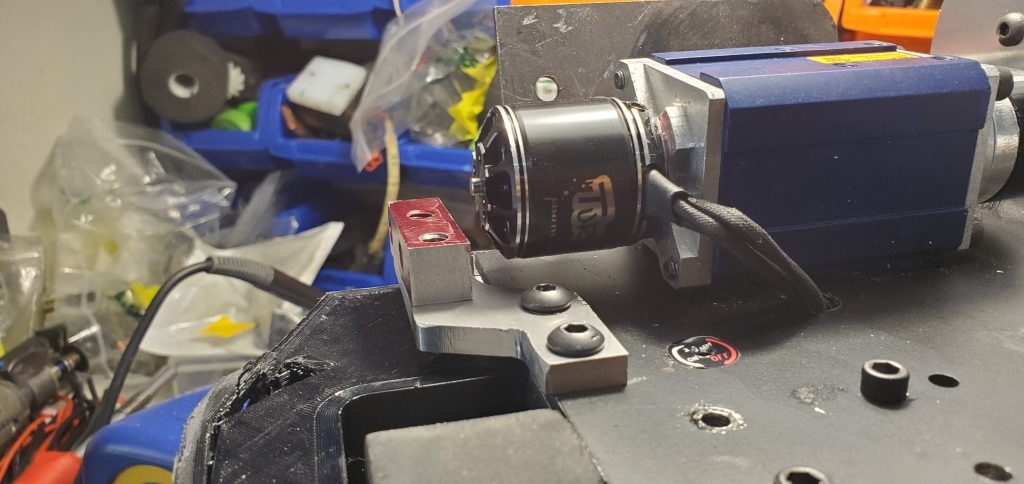



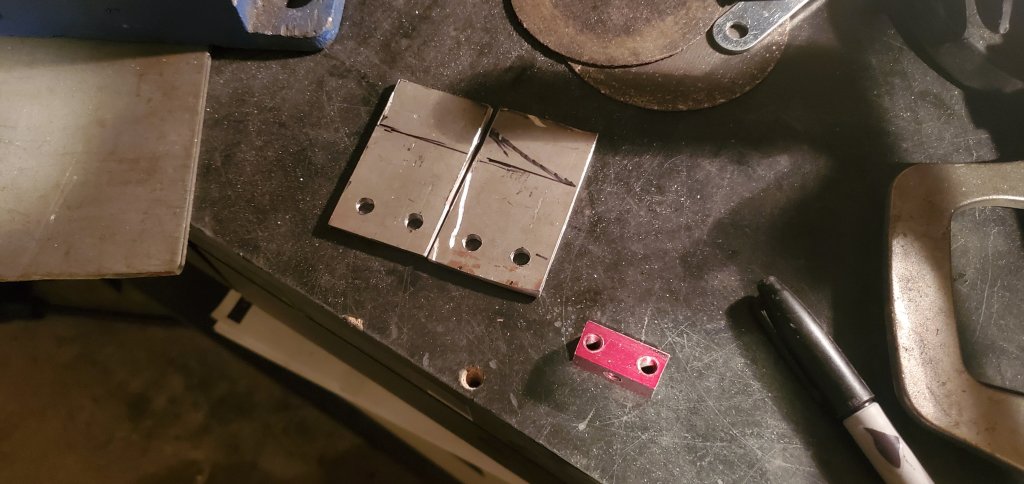



Now that the bulk of the robot was done, it was time for the finishing touches. Old outer guards were reused since it would take too long to print out a new set (we would leave out tomorrow morning) and a small guard for the lifter motor was machined out and attached. The cover of it was cut out from some 3/16″ mild steel which would certainly have been destroyed by heavy hitters, but was enough that if they hit it (ideally) that would give one more chance to the motor to work instead of dying on the initial hit. I also made side triangles as a way to deflect off-plane hits to them using old cut off AR500. Finally, the liveries were attached to the top plates of the machines. Thank Ian L. Springer for the wonderful designs!
Preliminary Bracket




Competition day itself was a fairly straightforward affair. The food was cool (check out that waffle sorbet!) but in general pits were hot from the insane heat wave hitting the east coast. Fans and misters were setup alongside the AC unit, but when you have people moving around frantically trying to fix robots it’s critical to stay hydrated/get food. This is one of the moments where I’m glad for all of the preparation on the machines since I could easily horde food at the beginning/get more waters between fights. Water bottles were being handed out by staff going through the pits which was also helpful.
I was fearful of top seeded Ares especially due to its excellent progression over multiple tournaments. Going into the first fights I was deeply worried whether or not the hubmotor would be strong enough to handle the shock of its own power. With fights against two 45lbers (TCC which was a solid welded shell and Mirage, a shuffler with a 10lb disc) I was fearful it could create too much stress and either shatter the magnets or spike the current dramatically and hurt the Rhino ESC.
TCC
In its fight against TCC I only used about 20% power just to ensure it didn’t overload itself. When it struck and inverted TCC I was greatly relieved as the hubmotor began to prove its resilience. 1-0, Knockout
Mirage
In its fight against Mirage I was once again lucky as their weapon didn’t work and the hubmotor once again proved resilient. Even after upping power to about 40% there wasn’t an issue and spun incredibly freely. 2-0, Knockout
Primetime Bracket
Due to no real service being done on the machine all day it was really easy to pick up stuff and move to the Primetime pits area. Its first match for Primetime was against multibot Beeforce from Team Honey Cracked.
Beeforce
As noted before, Phenomenon’s hubmotor was developed based on Zoe Lambert’s design and Beeforce was the robot these were developed for especially. In a sense, the battle was a great way to figure out the hubmotor’s strength as both sides could quickly learn from the other’s potential weapon failure.
This was probably the most exciting fight of the night for Phenomenon as the challenge of controlling two different robots was an exciting one. Through a balance of high pressure and the slow wearing down of each half of Beeforce, Phenomenon was ultimately able to invert both machines and win decisively. 3-0, Knockout
Anxietii

At this point, the goal of qualifying a second 30lber for the Finals was achieved so now the intention was to see how much the hubmotor could take. Anxietii looked good and certainly had power to rock the system if struck correctly.
Unfortunately, the fight was surprisingly short as their weapon system burst into flames. Though they got a firm strike (which you can see on the horizontal wedge earlier on the page) the hubmotor had no issues getting back to speed, inverting them, and then ultimately getting it stuck on the wall. I was told they had a series of issues now with the weapon controller bursting into flames even when not in heavy use so its definitely a trouble to consider later on for them. 4-0, Knockout
Mirage
And now for the grand final! Unfortunately the Mirage team told me they already had issues getting the weapon working so it was mainly up to Phenomenon not having issues. Because of this, I felt I could really start pushing the hubmotor’s power up as it had showed no issues all day.
During the final I was mainly wailing on Mirage as a way to keep it fun as the team behind Mirage was content to move onto V2 and I wanted to give the crowd an exciting end instead of an easy technical win. I pushed the hubmotor up to about 80% by the time it delt the last blow. When the battery came out, I felt it was a satisfying conclusion for all parties as there was no “more” left to give nor more for the crowd to ask for. 5-0, Knockout




Looking Forward
At this point Phenomenon had achieved its goals for this event and even won its first golden dumpster! I’m pleased the name finally got to hold some hardware after receiving two second place finishes across 2022 then 2023. With Vorion being unable to capture one over Emulsifier its good to keep the dumpster count growing!
As far as Vorion and Phenomenon go, both have achieved their goals so they don’t need to compete again. Phenomenon emerged from this competition with 0 damage so it can remain pristine until Finals. Since durability hasn’t been an issue and no new flaws were revealed, there are only a few machines I could see giving it a thorough shakedown but that’s picking fights for the sake of picking fights which is expensive and isn’t guaranteed in a field of combatants. While it would be nice to rematch Emulsifier, MegatRon, Yahoo, or other top ranking machines it would only be changes to configurations, less so to the rest of the robot.
The team won’t attend September NHRL for sure (two events in the same month really drains) so only October NHRL would be an option for these machines but at present there is no need for them. Something could change my mind until then, but for now its looking like a rare case of calm waters as the storm remains far out.

Leave a comment