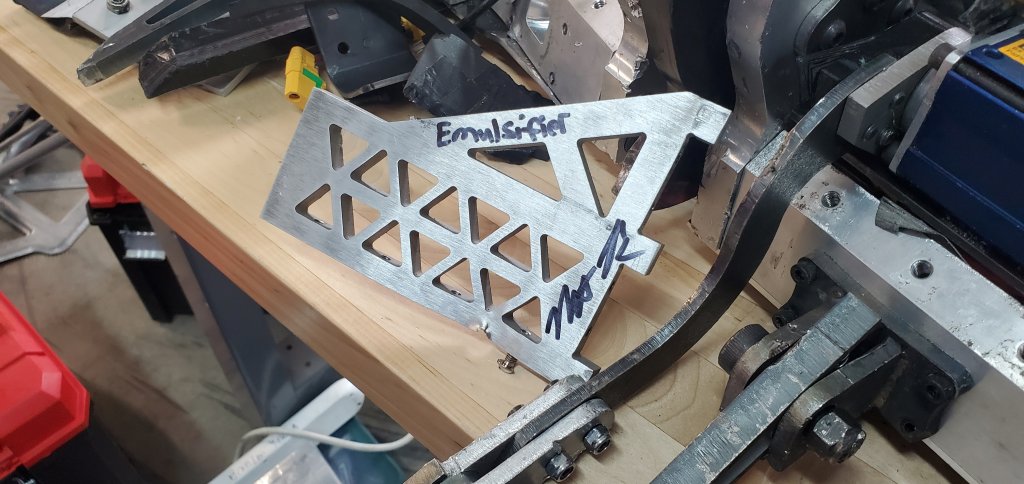
At the end of the month-long, three-event stretch for the 30lbers is the March NHRL qualifier! This event was what the entire strategy was based around: all of the learnings from February NHRL and Motorama were geared toward two goals: qualifying both bots and defeating the historical top dog of 30lbs: Emulsifier. Let’s see how it went!
Post-Motorama Inspection




Now that the event was over, it was time to look at the machine and figure out what exactly went wrong. First it was time to take apart the forkier robot that fought Ammonoid at Motorama. The damage to the chassis was very evident with a crack through the baseplate and bending of the crossbrace. The lifter also looked to be chewed up with the biggest issue being the limiting geometry (the little tabs on the back of it) being bent out of shape so it will need to be replaced. There was a nice scar from when Pepe Silvia grabbed the robot, indicating it did impart some real damage on the shot, not merely hooking the steel front wedge.


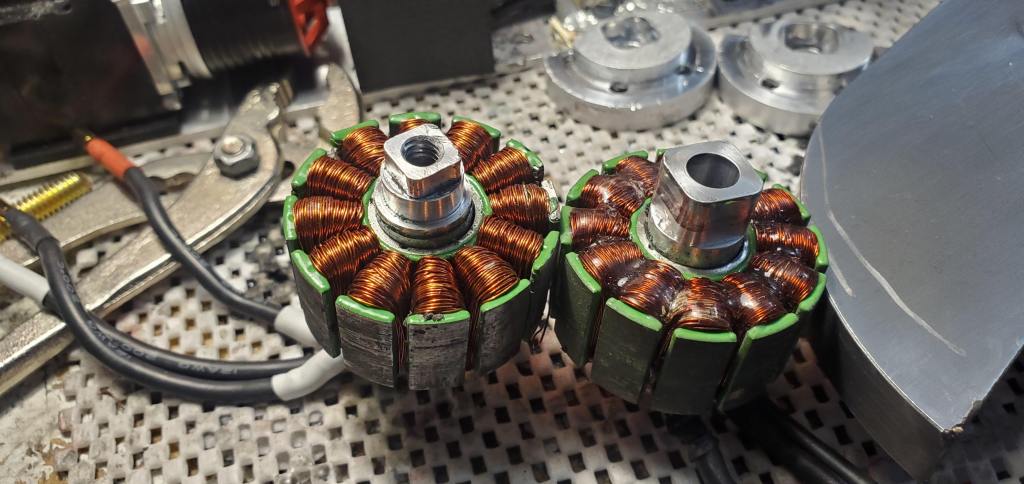


The biggest focus was on the hubmotor as it had the most infamous issues at the event. Surprisingly and frustratingly, there was no obvious issue with the hub. In contrast to the nearly new core in Demogorgon it was hard to tell if there were many new issues at all. In fact, the hubmotor on the horizontal configuration (the one that fought Pepe) was downright pristine with the epoxy easily retaining all of the wire. In a bench test where I removed the blade, placed it in a vice, then spun it up it had no issues whatsoever. To call it frustrating would be an understatement. While pleased that the motors were not fried, you never want the problem to solve itself magically as there is no promise it won’t come back just as easily. This will have to be tested more thoroughly later.
Upgrades
As noted at the end of the Motorama post, there was much to learn from the other tall and wide vertical spinners from the weight class. While I saw the limitations of my machines in contrast to them, the opportunity to glean some inspiration from then and innovate from it was going to be critical.


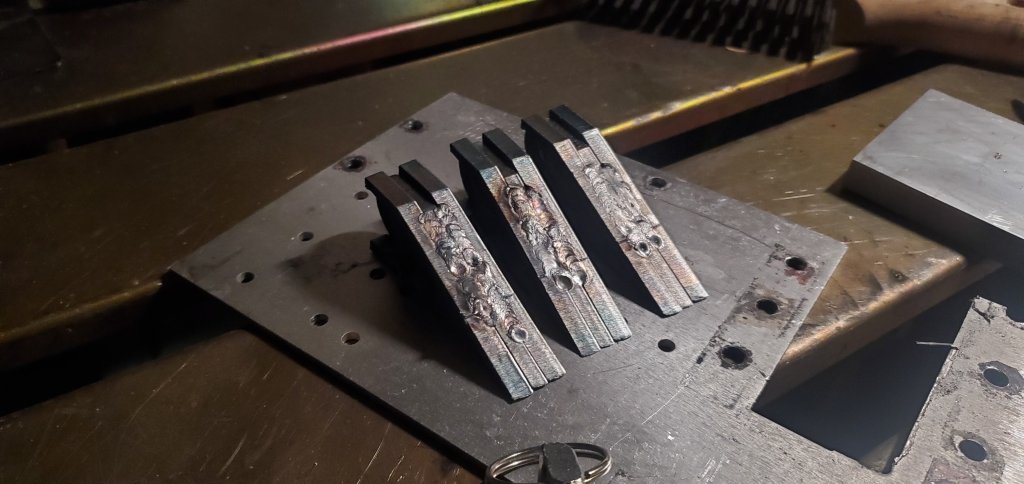

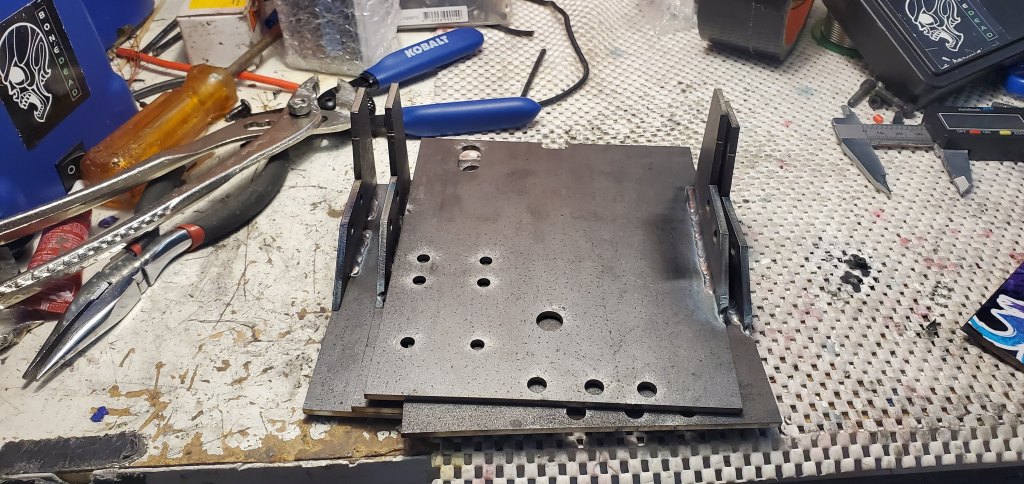
The first and most obvious update was to the lifter fork tip. The original had way too thin of material limiting its motion so it could never function well for long. Though it arrived just too late to be made in time for the event, these forks were made immediately after. Using stacked AR500 plates welded together, these very cheap and easy to make plates were easy replacements for the machined tips and would likely be much stronger due to the better supported tips and stronger base material.



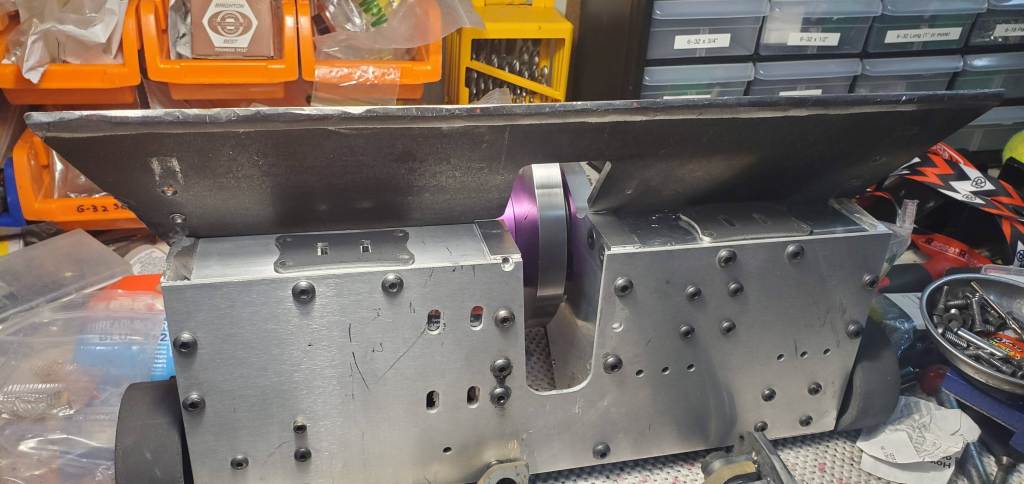
Despite the damage to the outer rails, a thought occurred to me: cut the exposed part off entirely. As noted at the end of the Motorama write-up, the bracers had consistently been a point where other vertical spinners could either come in at an angle and hook or prevented other machines from approaching the weapon. By removing them, the chassis was now only vertical sides with no obvious “under” elements for a spinner to grab onto. To replace the bracers, new solutions were cooked up thanks to inspirations from Overlord and Deadrise: outriggers.




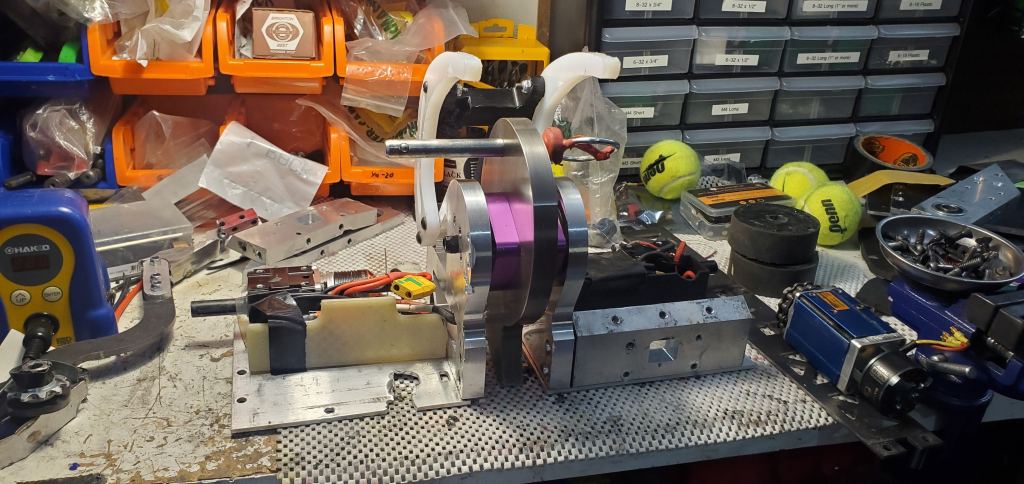
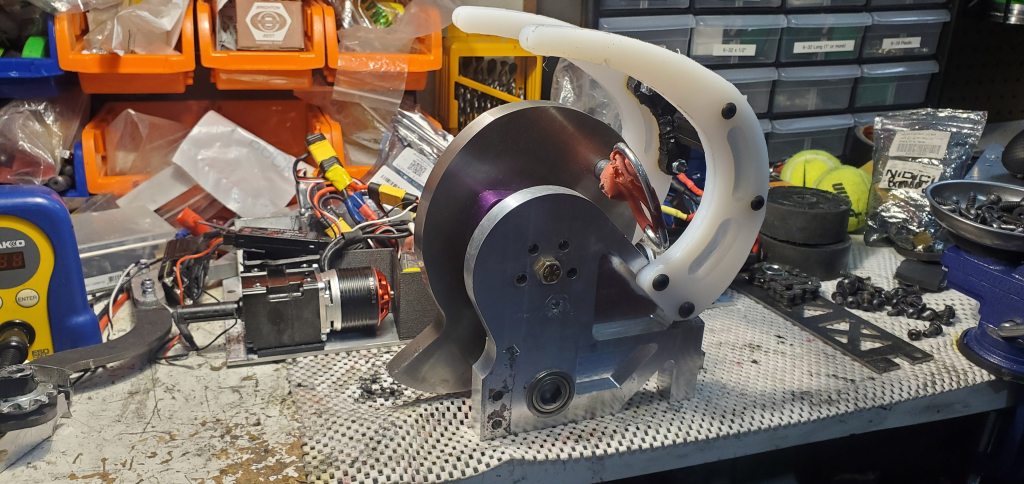
Using 1″ UHMW stock, these long outriggers combined aspects of both the bracers (they are the balance point the front of the robot rides on) yet remain flexible and elusive enough that they maintain the absorbing nature of the TPU forks from last year’s March NHRL. In theory, it should be much harder for a conventional vertical spinner, such as Emulsifier, to transfer all the energy through them and into the robot while at the same time still allowing Phenomenon to maintain its very smooth drive style and even get more access to the blade. The wheelguards (which were later reprinted from the same Inland TPU once the settings were better tuned) were reshaped to go around the outriggers to maintain the same overall aesthetic.

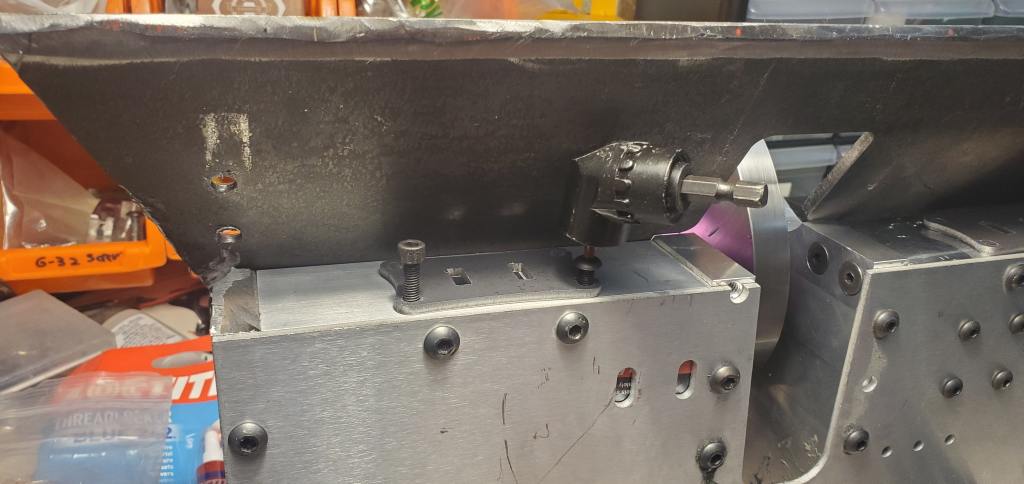
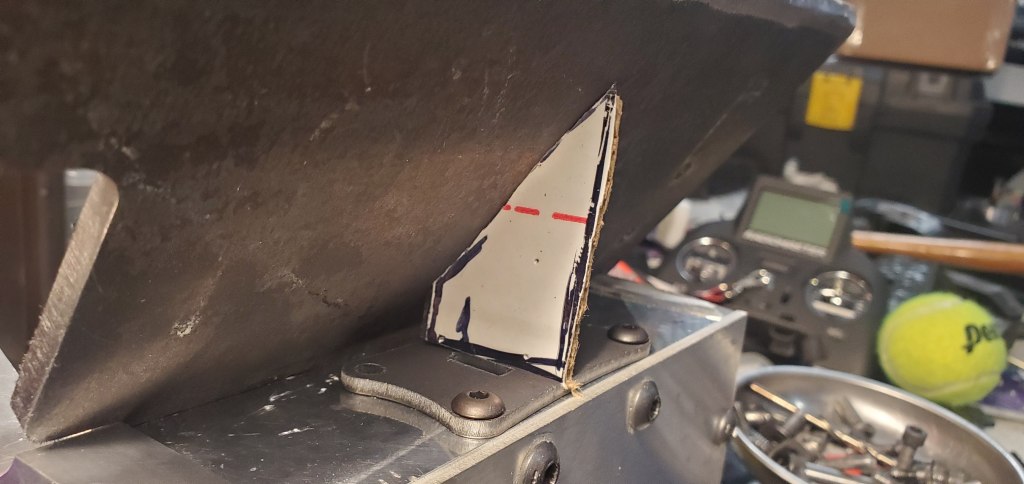



Since the additional mounting holes were gone, it was still critical to have a mounting procedure for the front wedge. I found an old 3mm version of the fork mounting profile and checked accessibility with the right-angled tool. Using a piece of cardboard I traced out the general shape, cut it out, then cut a piece of steel to match the shape. After using the bot as a fixture, the pieces were tack welded in place before going over it again for the full weld. While it did make some scorch marks through the paint on the other side of the piece, ultimately it came out well!

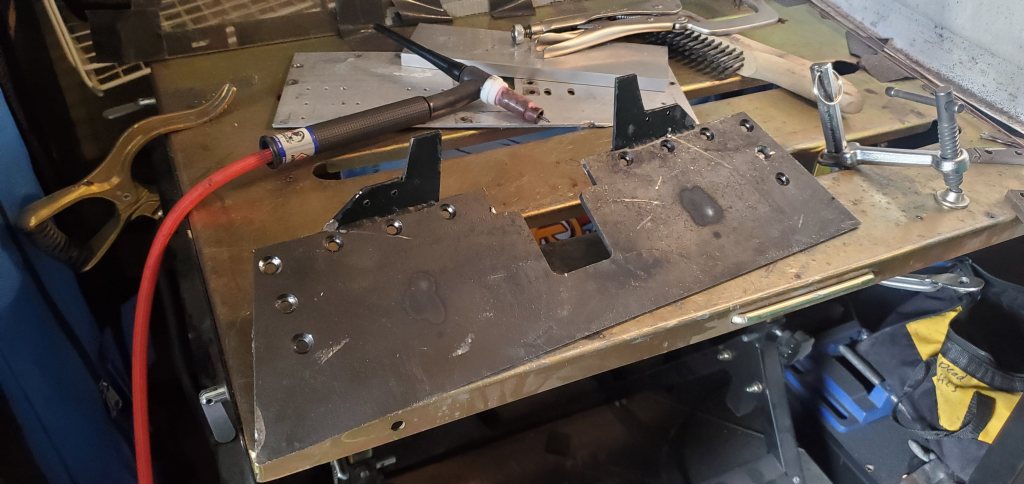
After welding some new deflectors to some new top plates made from 3mm AR500, it was time to assemble the bots! The spring forks also made a return as the tip staying down during combat proved to be very useful in Vorion’s fight against Synthesis 30 in the previous month.
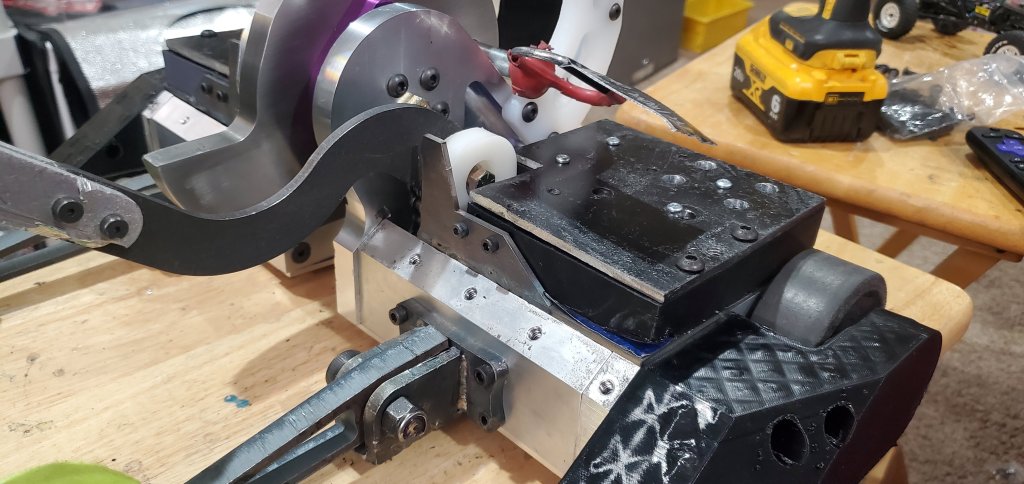
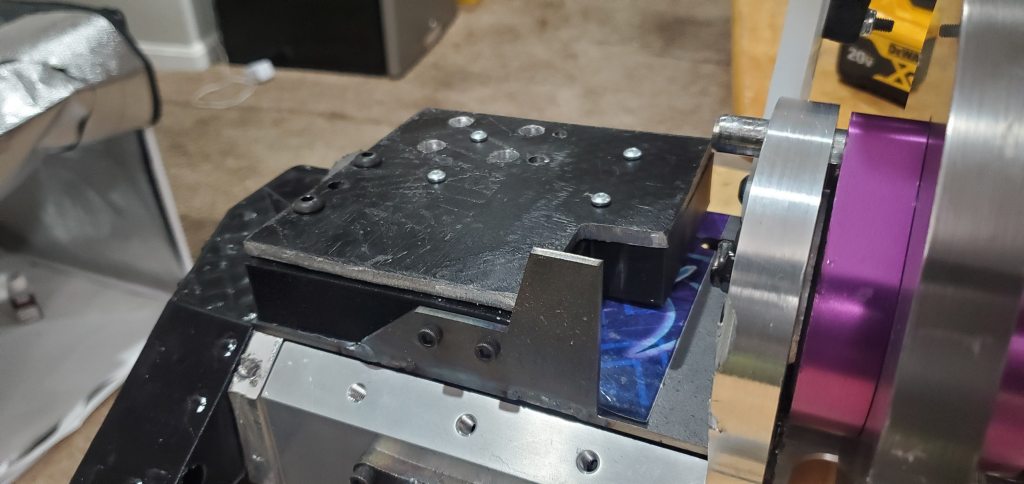
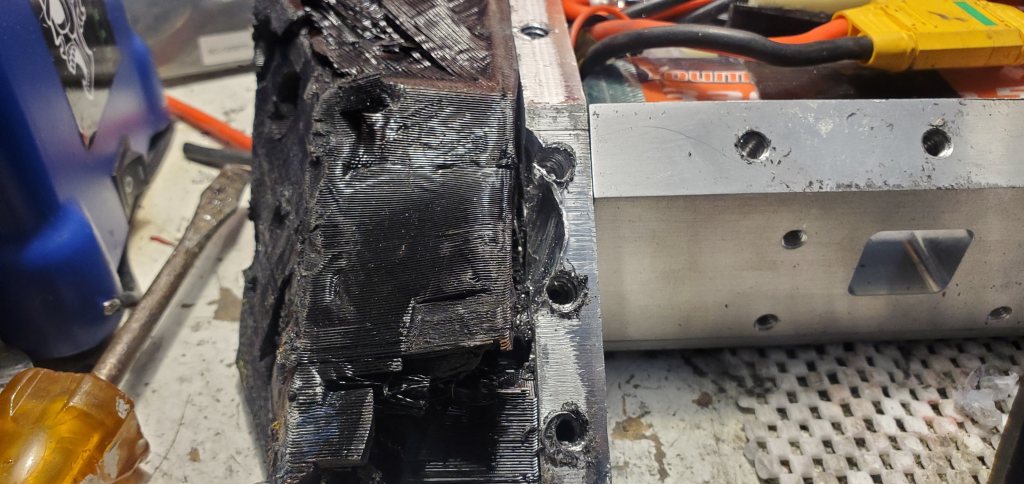
After the bot was assembled, anti-hammersaw armor was cobbled together from old top plates. The sandwich is a combination of 3/16″ 6061 Aluminum, followed by a ~1″ TPU spacer that acts like a spring which then sits on top of the 3mm AR500 top plate. It shouldn’t last forever, but should certainly be enough for some extra chances.
While there was contentment with the new shape coming together, there was still great concern over the weapon. Despite best efforts to silence the concerns, I could not help but find ways to test it further, the night before leaving for competition. After remembering the incredible disappointment with radio issues with Vorion in February and the disappointment with Phenomenon shortly after I was determined to find conclusive evidence of the weapon issues. As best as I could, the robot was tested (separate room, out of plane direction so even if the something hit the spinner it wouldn’t be aimed at where I would theoretically be) and I listened for blade speed and measured temperature after each spin-up. Despite tuning the current limit and charging the battery and cooling in between the spin-up remained inefficient until eventually there was a pop and ultimately no more motion. The hub had died. Given the consistency of the issue despite no changes from the previous version internally, I can only assume the increased blade width to 5/8″ led to just too much strain on the system.
Though I now knew the answer to my first question, I now had to answer the next question: how do you fix it? Since I did so much work on one hub halfway expecting the failure there was at lease one hubmotor that was still working. To ensure that hub would last, the blade was switched down to the original 1/2″ blade with a spacer to account for the extra offset. Though the spare one should still hold out, that left only one weapon option going into a potentially hellish run. With no other choices left and hours before departure it was time to use the last card available.
True Phenorion




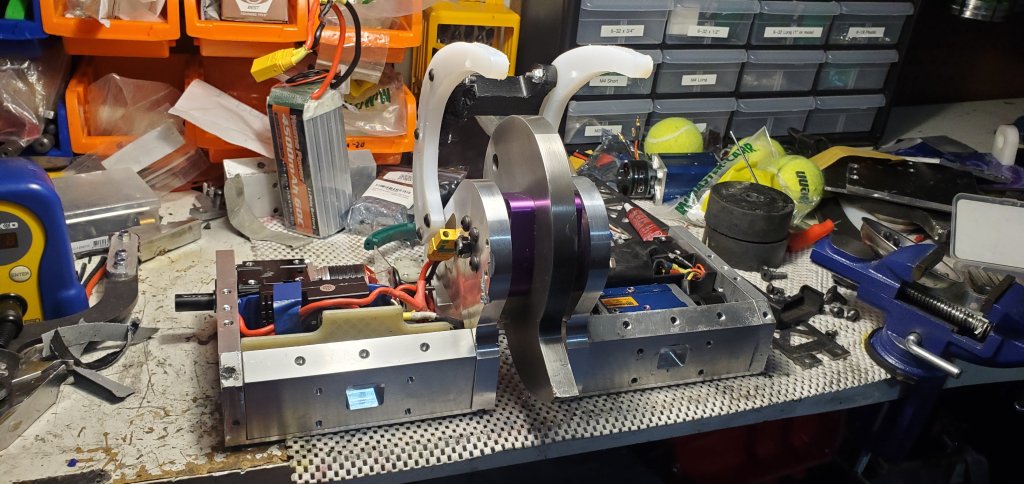
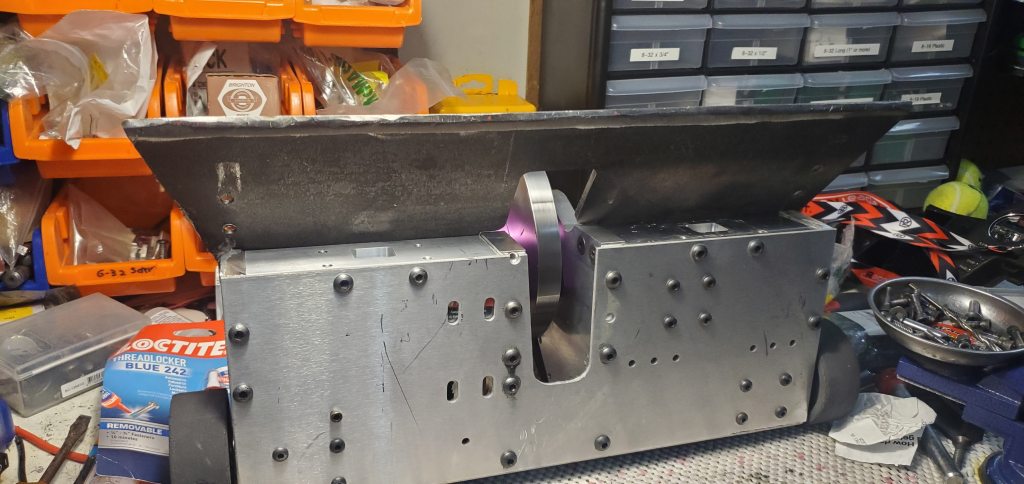
At sunrise on Friday I decided to fuse the Vorion and Phenomenon bases to make a true Phenorion. Since Vorion and Phenomenon are still designed around the same base and the baseplates for both capture all of the features so the swap ended up being a fun exercise in pit crew maintenance and adaptation. After the best attempts of the 8-32 tap to break off and ruin it, the 7 hour surgery was successful with the new, wider Phenomenon base receiving the Vorion weapon pulley system.
This ‘true Phenorion’ fusion was actually the application of the dual iterative design at work: by keeping the two bots related you can mix and match different ideas in each of them to get the best possible combo. Vorion’s weapon system was more rugged and powerful due to its built-in clutch from the pulley system and heavier weapon weight due to it being more solid metal instead of hollowed out to fit the motor. However, Phenomenon’s smaller weapon allowed for greater versatility such as putting the lifter gearbox inside the robot. Unfortunately I couldn’t quite combine those two strengths into one due to the short time and further design work needed so for now it had to sit atop the chassis as usual though without the additional armor. Fortunately the bot was still in weight giving two full robots!
Competition
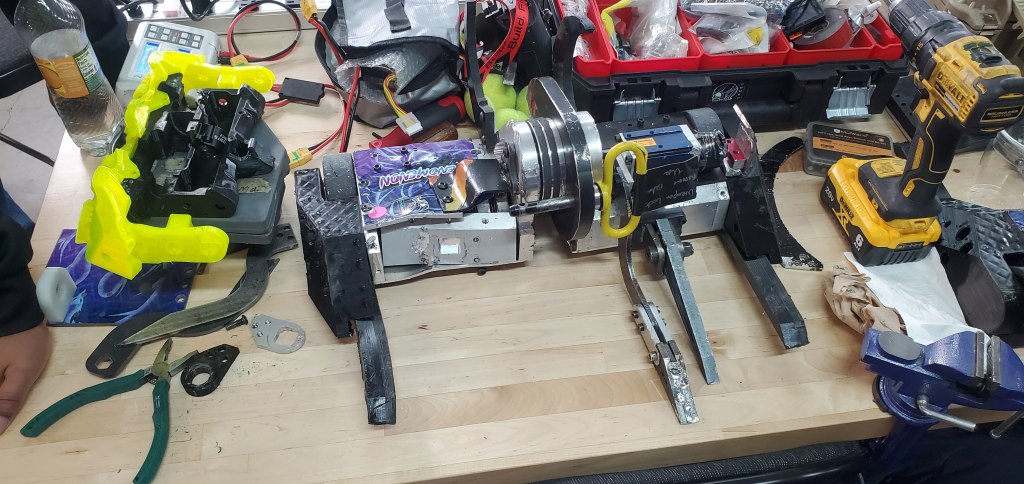
After arriving, hero shots were done. I’m a fan of the new setup with it being in a separate room from the pits and allowing more dynamic lighting.
Aethon


Even though the event itself had a smaller amount of 30lbers than Motorama, the fights I had were very targeted. The first fight of the day was against Aethon, a hammersaw robot from USC. Aethon has a striking resemblance to MegatRon, who famously set Phenomenon on fire years ago and has defeated Phenomenon in every fight they’ve had since. To say MegatRon has influenced Phenomenon’s evolution would be an understatement so to fight a robot that contains many of MegatRon’s features was an excellent test.

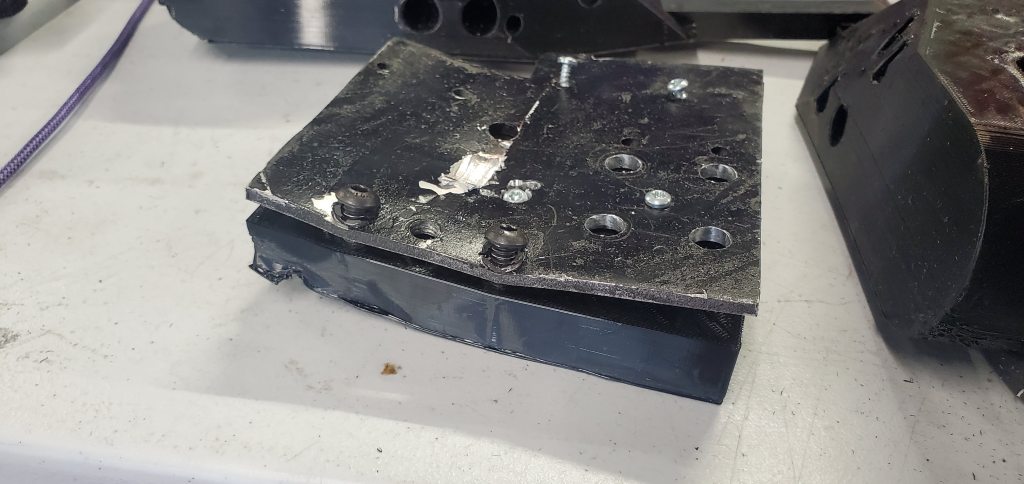
Ultimately the fight saw weaknesses in both machines on display. Aethon had some of the usual new both teething troubles that the team had already highlighted and it may have revealed a couple of new issues over the course of the fight. One thing I am glad worked on their machine was the hubmotor hammersaw as the main shot they got in this fight did an excellent job testing the material sandwich. The 1/4-20 bolts that were doing most of the securing sheared off which made part removal trickier later on, but seeing the materials work the way they did was cool and gives hope for a more serious one in the future.
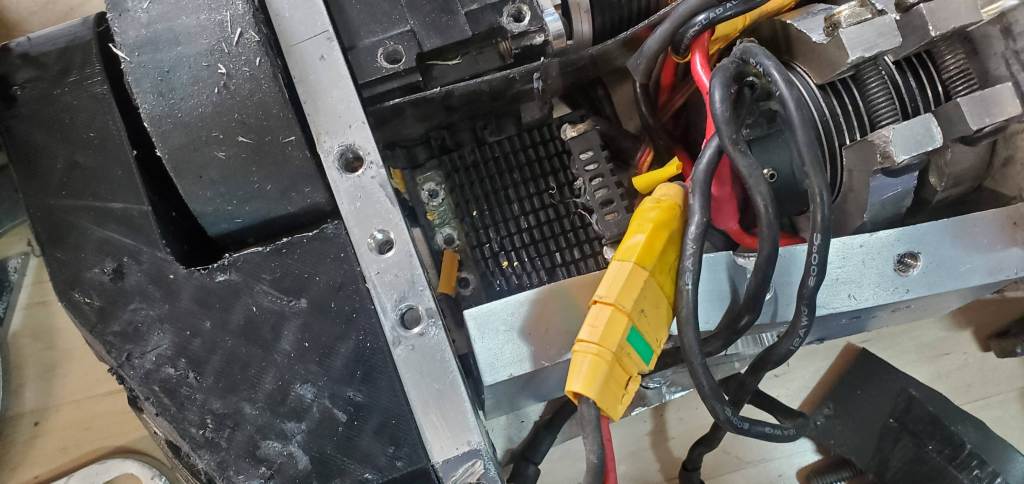
Unfortunately the hubmotor system on the robot was sparking as the motor leads weren’t fitting neatly in the channel for them and as they moved on impacts (the epoxy holding them into the frame seemed to fail) they were gradually worn down by the hub allowing it to create a connection. While suboptimal, the bot did make it to the end easily and the wires could be inspected later on. Even so, I was skeptical of the weapon system so the Phenorion that was prepared the previous morning with its more reliable pulley system (albeit exposed lifter motor) was a preferred choice for whoever it fought next.
Due to the nature of the bracket, this was the only fight Phenomenon had to win as it received a ‘Bye’ in the first round allowing it to garner 2 wins and enter into the main bracket with high seeding! Unfortunately, due to some upsets in other parts of the bracket, the usual expected matchups changed dramatically leading to a surprising Round 1 draw.
Phenomenon v. Emulsifier. Winner goes to the semi-finals and qualifies for the Grand Finals in December.
Emulsifier
The importance of this match-up cannot be understated. Emulsifier is the most-feared bot in the class with the highest win percentage of any 30lber in NHRL, likely in all of North America. MegatRon may have scarred Phenomenon, but Emulsifier scarred MegatRon. A year ago Vorion squared off against Emulsifier in their second meeting and that loss spurred a year of intense investigation and documentation (hope you’re enjoying the blog!). It was a quarter-final fight played with World Championship intensity.
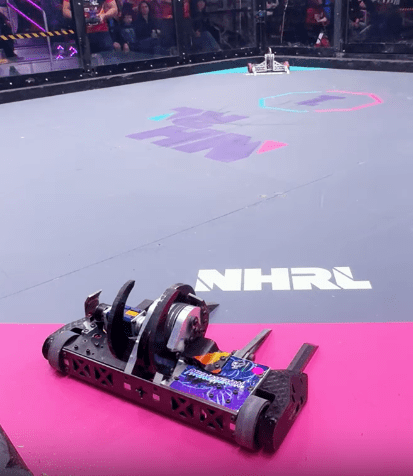
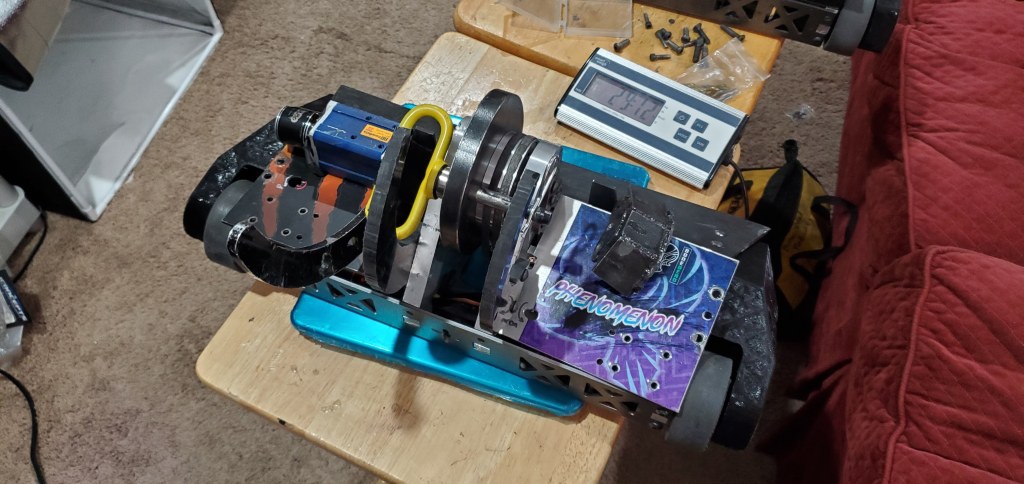
It turns out that the NHRL producer team knew as well because their fight moved up to the first one of Primetime! It was the calm before the storm. Since this robot was Phenorion, I decided to keep the Vorion weapon motor cover graphic over the Phenomenon graphic to symbolize the union of the two. It also, in my humble opinion, looks very cool as orange/black and purple/silver are natural complimentary color pairs. Definitely something I may remember in the future.
Part 1: Pressure
The beginning of this fight went even more perfectly than I could have ever imagined. Knowing Emulsifier, I knew the first thought on his mind was getting up to speed for a bone-crushing knockout punch, but every decision on Phenomenon was designed to negate that. The weapon was kept at fairly low speed throughout the fight, ensuring that any impacts by the weapon had high bite and would keep him unbalanced. The forks and outriggers ensured any interaction would only occur on Phenomenon’s terms; there were no ways to hit the robot unless I wanted it to hit the robot. Put all of these together and you get an Emulsifier flying by the seat of its disc with Phenomenon pulling off bits of the robot little by little as it bares down.
Part 2: Control
One aspect that separates the Phenorion line from most vertical spinners is my insistence on using a lifter and that insistence comes from moments like these. In the delicate stalemate where I need to ensure the next interaction goes positively, this little tool proves itself, by tilting Emulsifier back, putting it on the backfoot and allowing Phenomenon to come across the face of the robot and continue to inflict damage.
Part 3: The Counter
The last portion of this fight was saddening, but not maddening. Due to the chaotic nature of Emulsifier’s newly liberated blade, a combination of drive and weapon power propelled the machine into a shot no one had done before: directly strike the cross-brace. It seemed the disk directly hit the fork assembly which kept Emulsifier from cutting into the chassis but did allow it to transfer a lot of concussive fork which bent the frame. Usually this isn’t an issue as the fork angle would direct the opponent away from it and the chassis of most robots would be caught long before then. However due to the time and position of Emulsifier in that moment it used its blade to essentially reach over and hit Phenomenon with the equivalence of a shot to the jawline in boxing; the bot was dead.
After about 1 minute of combat, the duel was done. Though Phenomenon lost in tragic fashion (the reason why will be coming shortly), the loss did not disappoint me because ultimately we all knew. We all knew the direction that was going and we all know that gap was closing. That being said, I won’t rest on my potential laurels for one does not become the most feared 30lber casually; I must assume he will improve as well so refinement must always continue whether the next meeting is in another qualifier or the World Championship.
Post-Fight






First of all, kudos to Emulsifier for the very precise shot as few other shots could have stopped Phenomenon so suddenly. Despite the obvious shearing of the weapon ESC, the real work was done to the Kake switch hanging out in the very back of the robot. At the end of the fight, I noticed after moving the robot slightly that the robot began to make tones as if it were being turned on again, leading me to believe the machine had simply the turned off. In the pits, after I had removed the ESC, I did a quick test powering on the machine and it came to life with drive being in perfect condition. The lifter motor was crumpled (no surprise it couldn’t be stored internally) but the robot could have at least lasted longer in the match otherwise. The current theory is as the weapon ESC was compressed it pushed the wiring back which nudged the tabs of the Kake switch just enough to turn it off so when that pressure was released the tabs would have reengaged and kept the bot going. A bit disappointing, but ultimately not a big deal as the chassis crumpling was the far greater issue and a less-rushed wiring job could remove any direct pressure in the future.
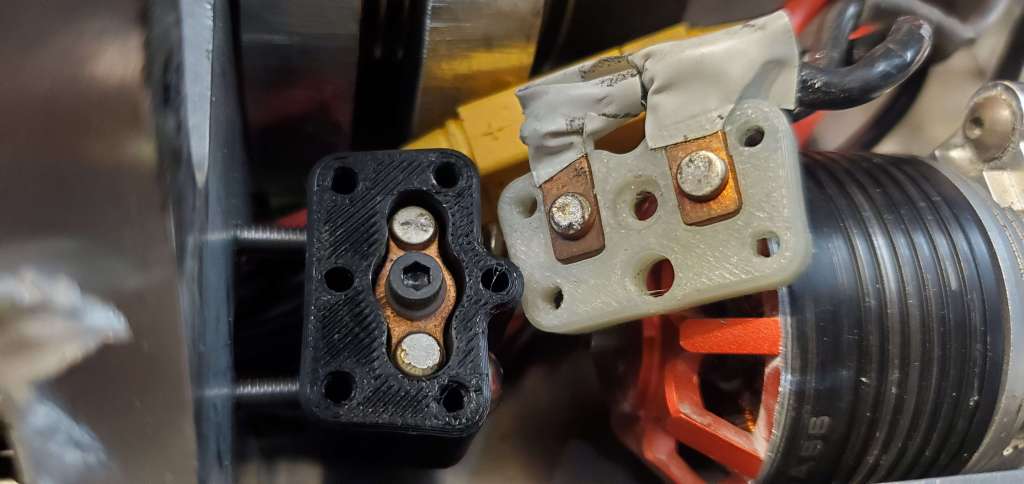
After tearing down the Kake, it looks like the internal copper bar may be bent a small amount as it looks like one contact was doing most of the engaging. This inconsistent loading could mean when powered on it was only partially touching allowing a big impact to shift things up enough to turn off. Certainly a rare failure mode, but one that can be fixed in the future.
Conclusion
Though a short event, I am overall pleased with the robots. The learnings from the month proved themselves in the best way possible and the design goals going forward were vindicated as well. Though I do love the pulley system, the hubmotor is superior in terms of allowing other systems to be more protected. As mentioned earlier, if the pulley can be maintained while protecting everything else the opportunities for failure will (hopefully) continue to shrink while confidence in the bot can grow. There will need to be some chassis updates to better resist buckling (though the force and position of the shot was rare) and slimming down of wiring to allow for different battery options, but overall I am very pleased to see the design evolve to such a degree.
The robot did also wheely more than usual due to less weight on the front so the blade may be moved slightly forward to counter it which may also provide more reach opportunity anyway.
For now the 30lbers will be on break until May to give time for rest and more updates. Tentative plans are to go beyond the normal regional events, but time will tell!
Check back for more event reports and check out the build diaries of the robots!

Leave a comment