
Background
June NHRL began immediately after Phenomenon lost in RCL. As I noted in that event report, after observing issues with the hubmotors the robot was shut down and didn’t fight again explicitly to preserve it for June. This event held high stakes since Phenomenon didn’t qualify due to losing to Emulsifier in March. Since NHRL was taking a break for the summer, there were only two more events (October and November) where it could qualify again and both of those events would have considerably less time to iterate. Phenomenon had to qualify in June.
After returning from RCL, the first thoughts were “how can the weapon system be fixed for June?” Since the hubmotors had proven a consistent thorn in the side since the beginning of the year, the first decision was to move back to the belts from Vorion. However, the internal lifter gearbox proved to be a huge benefit as it cuts down on damage and cost per fight considerably. However, very tight body size of the robot is too small to fit these large assemblies alongside the rest of the essential components so it will take a few creative ideas to get it to work.


Since the belts will be important, the first act was to cleanup the center rails used against Emulsifier. The edges were rough from where Emulsifier’s blade chewed on it and the blade guard bolts were sheared from impacts against it. A bit of angle grinding on the edges cleared up the burrs and welding some steel to the remainder of the bolts allowed it to be extracted via unscrewing.
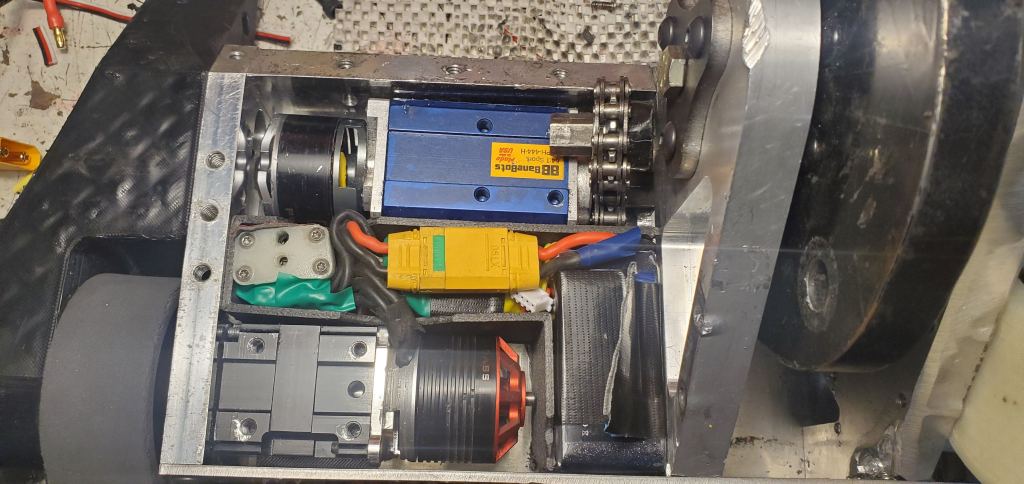

The biggest issue for fitting the lifter and spinner systems is the location of power. It’s no surprise that the weapon drains the most power in the system but the question of how much it drained was a mystery. In the very beginning of Phenomenon’s design, it used a 6s 4500mah battery which easily powered the entire system. For Vorion this was later decreased to 6s 3300mah with ~2800mah being pulled from the battery in particularly intense matches. Since the entire machine was tied through one power source, there wasn’t a good way to isolate how much came from what source especially due to the dynamic nature of combat. To test this idea, two 6s 1500man were set to power each system independently of the other.
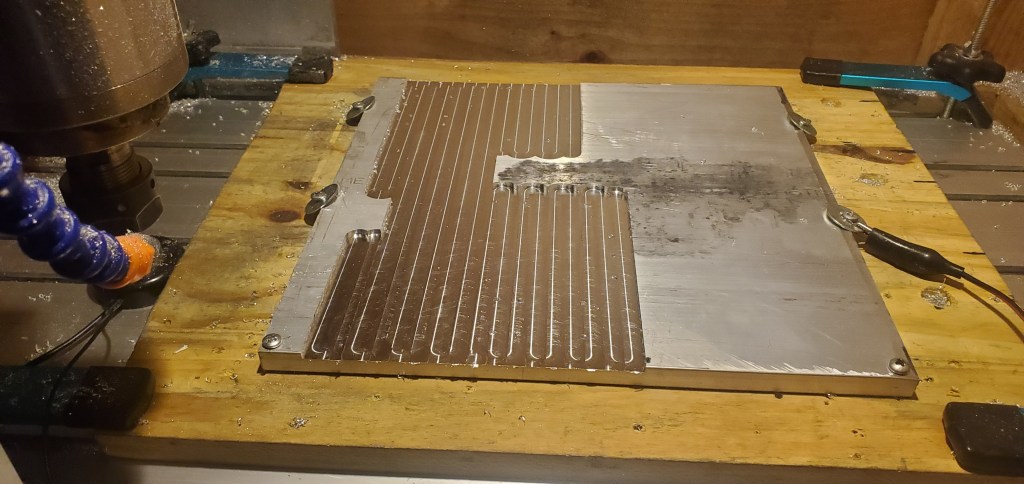




To help give some clearance for the batteries (and serve as potential top armor options) 1/2″ aluminum plate was hollowed out to fit the battery bump.

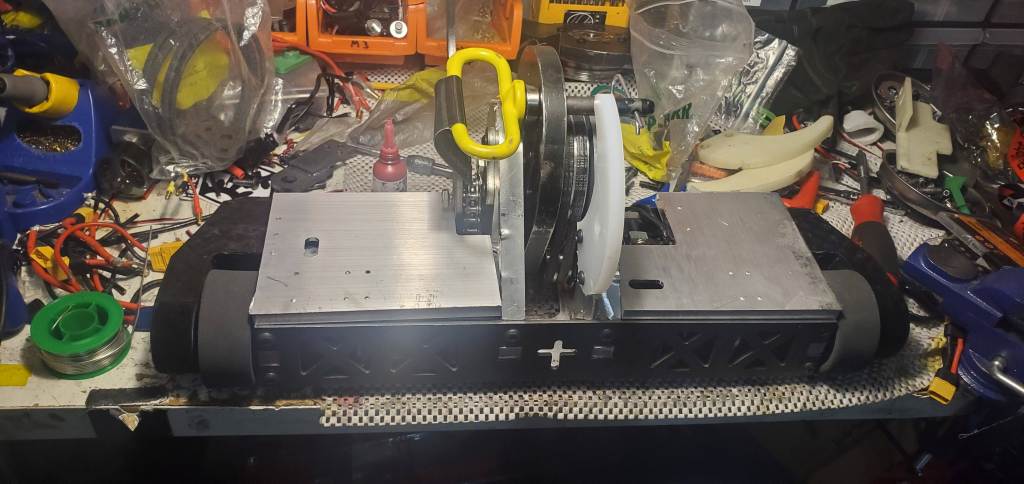
Once it was assembled, it was taken down to the Hive! The testing itself was brief and straightforward (which is generally a good thing). After 3 minutes of hitting things and having no issues, it was time to check the batteries to assess the power drain.


The disparity between the two battery sets was alarming. The left side (which had the lifter and one drive wheel) maintained a very healthy 74% battery remaining which is a lot of extra capacity. Even if one took their battery down to a generous 50% after fights, that means the left side could run for two fights in a row, still plenty of capacity. This battery could likely be shrunk to half of the pack’s original power to ~800mah if this was to run competitively.
By contrast, the right side (which had the main weapon and one drive wheel) has a feeble 5% capacity remaining. Not only is this hard on the battery and will ultimately shorten its life span, but it means these would be dead at the end of the fight meaning it would fail most of the functionality test. Even further, this was in a light testing condition; during a fight where a weapon can come to a stop after a big hit or damaged by another weapon (ex. dented bearings) then the current draw would be even higher and the battery would have likely given out much earlier in the fight and doomed the machine.
With only two weeks left, it was time to go back to the drawing board.
Plan 2b
In the plans for this robot line, there are two different trees: hubmotors and belts. The first option for 2025 is the hubmotor with hope of decreasing the belts as it growed; this is Plan 1. The various attempts to iterate on this over the course of the end of 2024 into 2025 (which are spread throughout the other blog posts) have all been iterations on this so Plan 1a, 1b, 1c, etc. Since the hubmotor has failed (for now), it was time to go to Plan 2 (the belts) and iterate them again. Plan 2a just failed, so now it is time for Plan 2b.

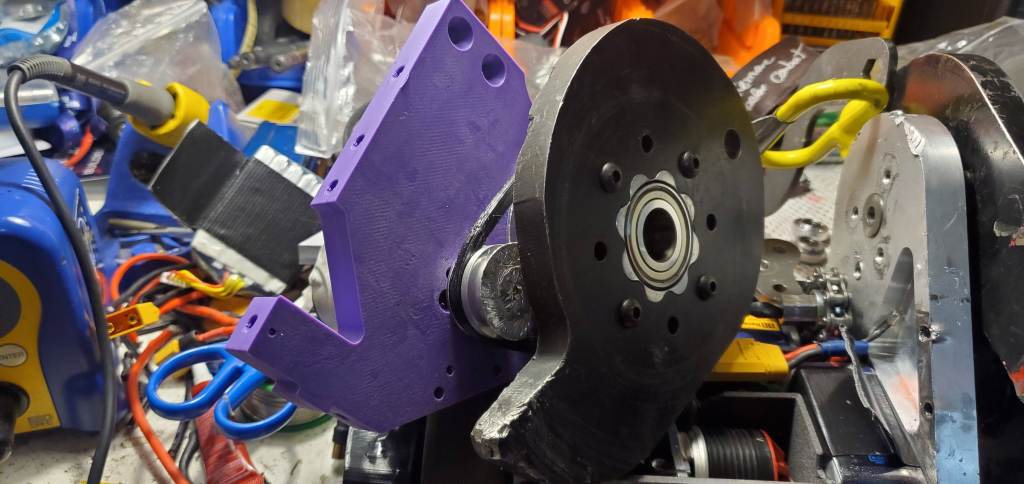
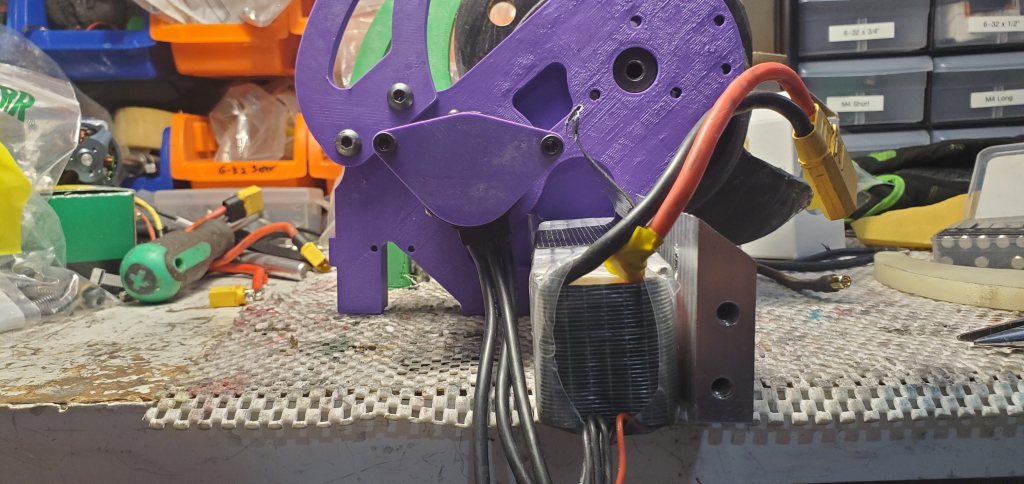
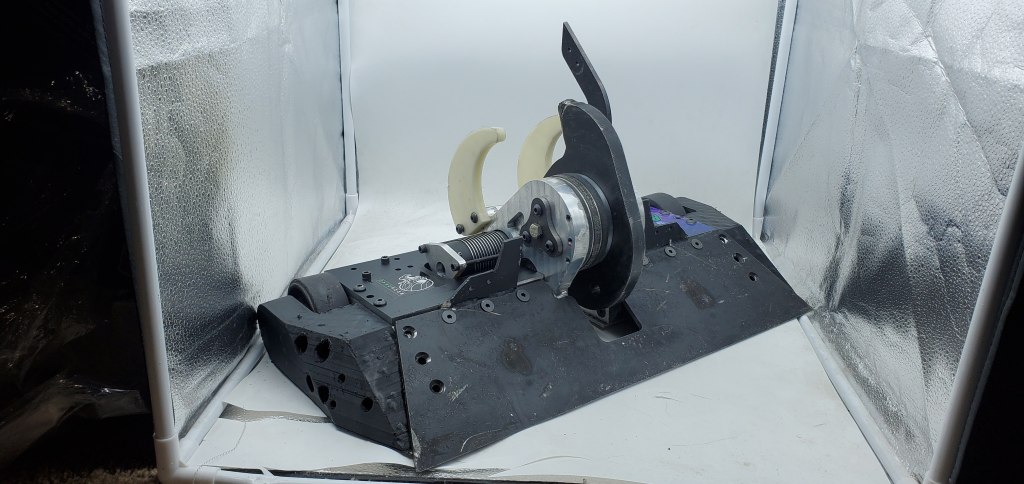
Plan 2b was in theory simple; if the weapon motor was taking up too much space where it was, move it somewhere else while maintaining the radius. You can see the benefits of this move in the photo on the right that the standard 3300mah battery could fit under and to the side of the motor allowing for full battery capacity without having to remove the internal lifter gearbox from the other side. The hard mounting system on the motor has been done to great success by other tall vertical spinners such as Overlord and Deadrise though I was very concerned about not just supporting the motor can but also maintaining belt distance as variation in v-belt manufacturing can lead to being too loose or too tight in application. The current system allows for some flexibility by having a small TPU gasket under it which can compress if needed. To mitigate my fears, time was spent iterating a TPU v-belt design to mirror the actual ones which, alongside reprinting the uprights, led to good confidence in the shape of the new rails.


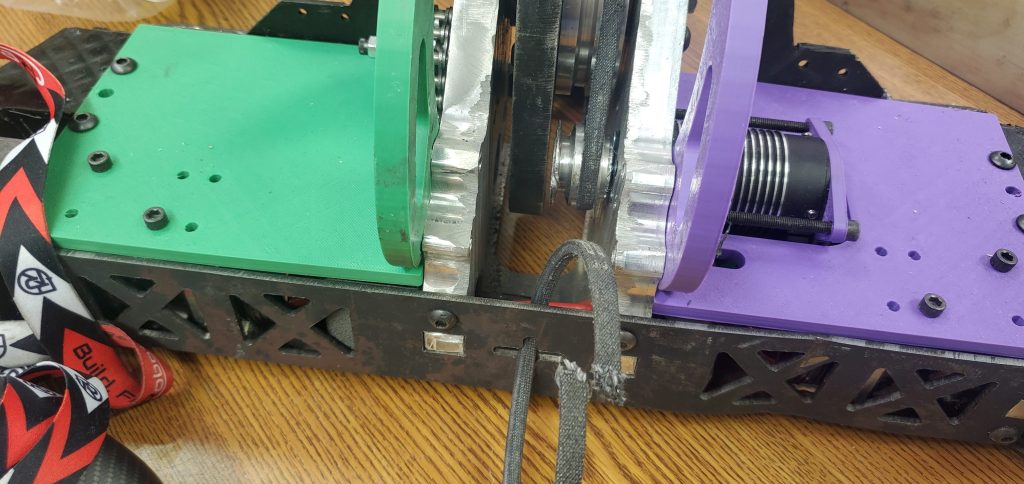
With the belt tension good, a full cradle assembly was printed out in green and purple Super PLA+. Additionally, the weapon was moved forward 1/2in to combat the wheelying problem the robot has faced. It’s a delicate balance to maintain good weight over the drive wheels, but not enough where the front digs into the ground. Preliminary testing (i.e. replacing the metal cradle with the plastic one and driving it around on the garage floor without connecting weapon) was promising so it was maintained.

One more feature was a better support for the lifting arm. Originally the arm ran on a 5/16-18 hex headed bolt that threaded into the central frame rail. Because the bolt was only threaded into the rail with no additional locking feature, the friction from the arm rotating over the bolt would gradually unscrew it, leading it to eventually disable itself. Another issue to work around was ensuring the lifter and top plate could still be removed without much trouble so the solution still had to be modular. The solution to this was welding a dowel rod to a mounting place that bolts into the frame rail. Since the securing method isn’t affected by the rotation of the blade, it avoids the unscrewing issue. With that solution included, time to make some parts!


The CNC router had some issues cutting out the frame rail, but ultimately with the assistance of the bandsaw and angle grinder the pieces were removed.


Before I fully removed the pieces, I used them as a jig to weld the plates and rod together. Both rested in light fits and were both hit with a torch pre-hardening. Since the dowel rod has a very high hardness surface, it was critical to get it heated beforehand otherwise the heat differential would create internal stress and form cracks. After a few quick welds, the mount was assembled and removed so it could be end-tapped with an 8-32 screw. This screw is still a failure point on the lifter that may be revisited, but since the 5/16in rod could easily be destroyed by the power of a full 30lb robot’s weapon I accepted that it would likely completely fail if that were the case.


One more innovation that came to mind was thru-bolting the weapon. Historically the pulleys used end-tapped 1/4-20 bolts to retain the weapon, but ultimately these screws either got jammed in the shaft and couldn’t be removed and/or they vibrated loose. In either case, the shaft could not serve as a structural member to resist splitting apart like against Pepe. The hubmotor had a bore to fit a 5/16-18 bolt so I figured “why not here?” Though this does weaken the shaft, because of the narrow length of the weapon, the loading on the shaft was still minimized so I was confident in not bending during fights (though that would have to be seen!) all while doing a much better job resisting being torn apart.
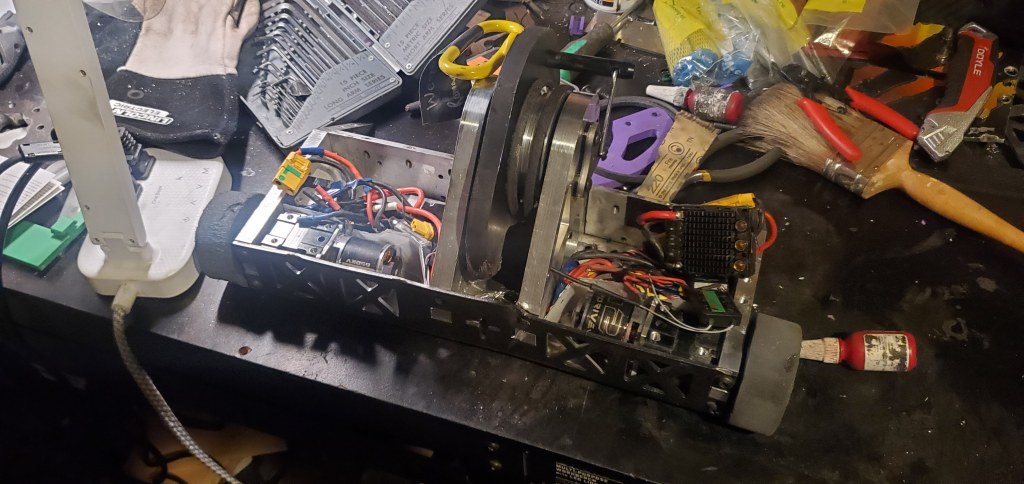

Now that the new parts were made, it was time to fit them to the machines. Here is the base of Vorion after fighting Undertaker in February. Undertaker did quite a number to it so it took some labor to unbolt the components. The baseplate especially had a remarkable amount of cratered areas such as the part behind the weapon motor from the fight. I look forward to a rematch against Undertaker and deal some payback!

After the teardown, the reassembly began. T-minus 2 weeks until competition day.

After a furious blitz of building, one copy of the machine was reassembled and prepped for testing at the Hive.

After some incredibly powerful hits, three issues were discovered:
- The left drive had slipped (this could be fixed with adding retaining compound and retightening the Versa pinion)
- One of the v-belts was cut as the motor mounting screws began vibrating out thereby pushing the small pulley into the path of the blade just enough to create a small cut in it. It was posed in the backplate for the photo
- One of the ball bearings shattered in the blade. This bearing slid out of the pulley body very easily so it likely shifted in the bore and impacted at one point leading it to crack.
Though it was a bit annoying, these issues were still easy enough to deal with overall (a new bearing was added and slathered in retaining compound) so it seemed Plan 2b was going to work! With that looking promising it was time to make more parts and the second bot.





After making some top plates and motor retaining plate from 1/4″ Aluminum, the hubmotor cradle from the Phenomenon chassis that went to RCL was removed and reassembled with another pulley cradle. It took some time to drill and tap the holes, but overall it came together pretty good. Now onto aesthetics!
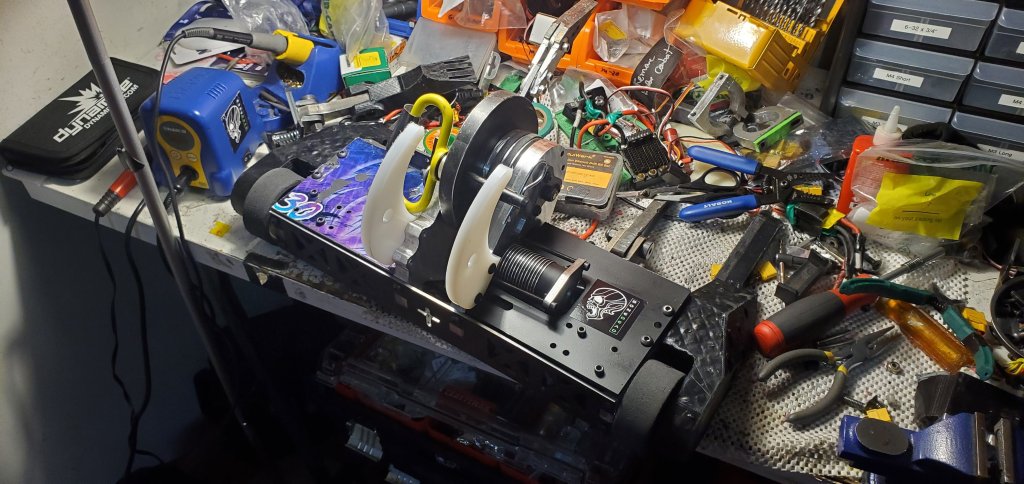


Since the large motor cutout would destroy the normal livery that’s on the right side, I elected to just paint it black and show the team logo. To still have the name of the machine displayed, I was able to experiment with a vinyl cutter for the first time and overall I was pretty pleased with how it came out!
Competition






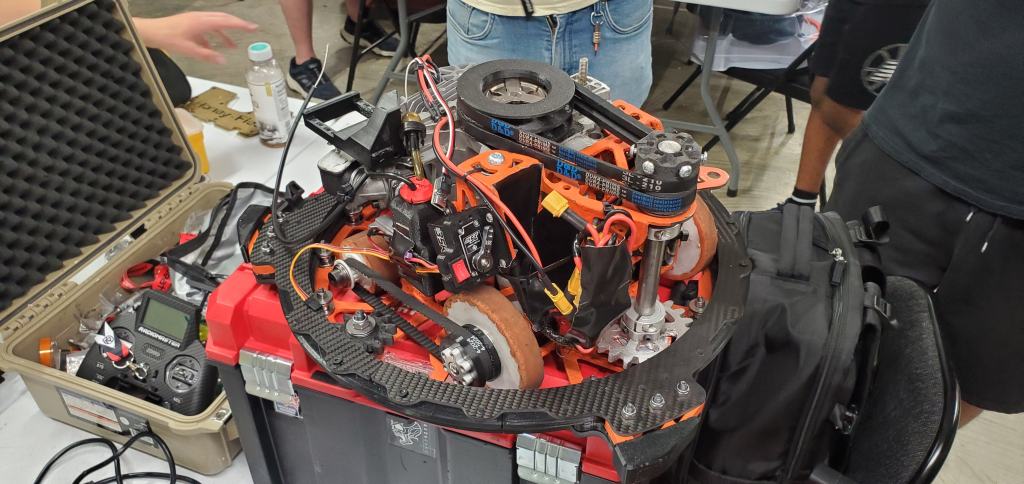
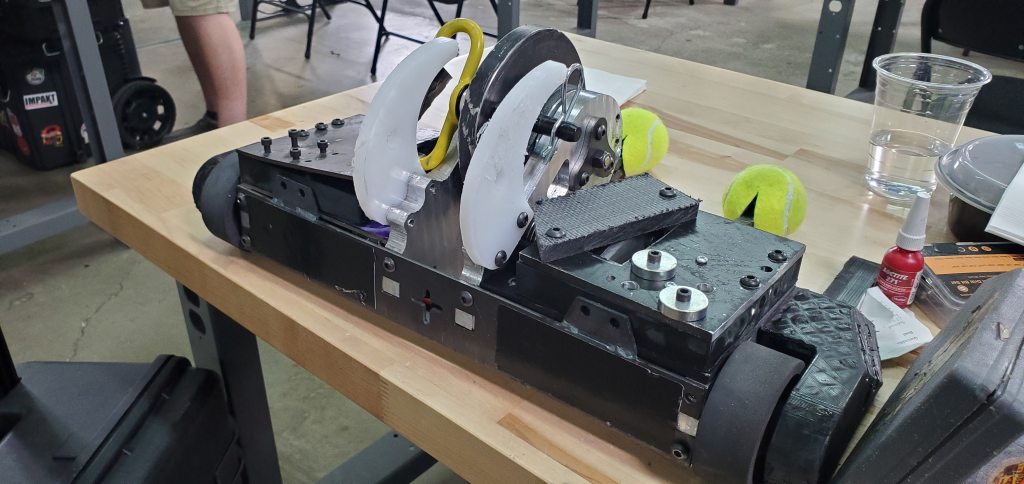
Here’s a quick sampling of some of the cool machines at NHRL (including the world-famous Bam!)
Fights
Two Stroke
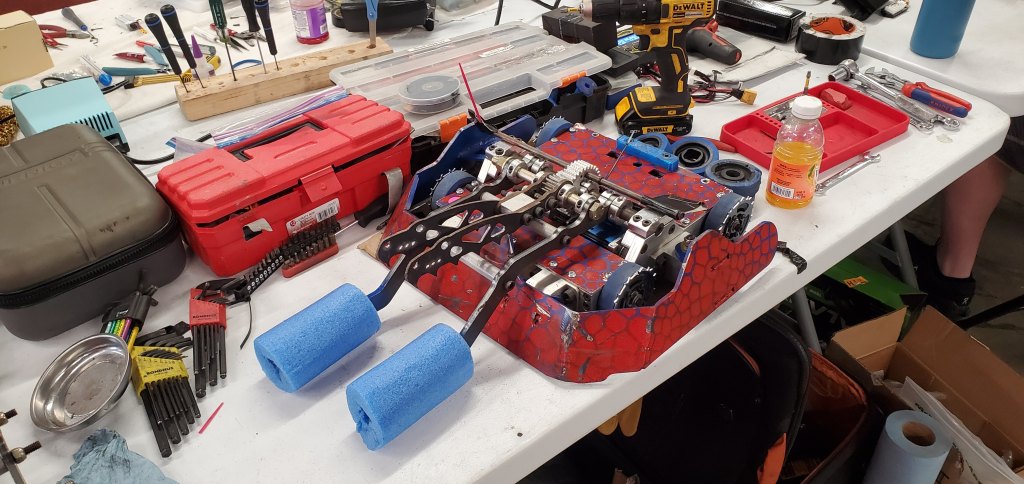
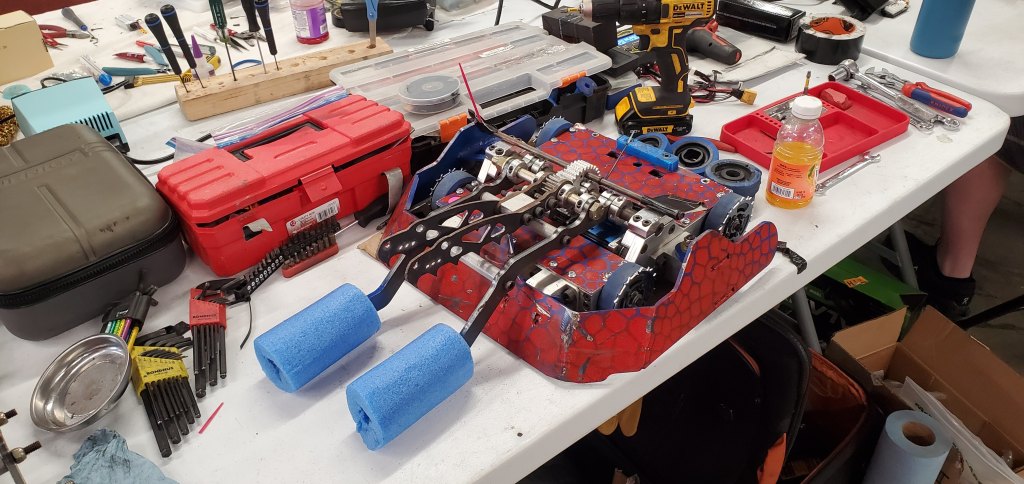
Phenomenon’s first fight of the day was going to be against Two Stroke, though sadly they had to forfeit. This machine was going to be the first attempt at a gas engine-powered shell spinner but the effort to get it going was more than they could get together in time. The labor to get this together is incredibly impressive (as you can by all the complexity in the image above) so kudos to them for pursuing it!
Winner by Forfeit, 1-0
Red Storm
Phenomenon’s next fight was against Red Storm. Red Storm previously fought and lost to Vorion in the finals of the All-Star event in 2023. Phenomenon is a very threatening machine for Red Storm as the ground game and forward weapon mean that it is very good at challenging Red Storm’s ground game while also forcing it to use the armored hoop to protect the wheels which then also becomes a premium catch point for the spinner. Though Phenomenon holds attack advantages, Red Storm’s drivetrain and lifter could prove tricky as it could take the hits and control the match.

This brief snippet summarizes the fight well: Red Storm slowing down the pace and controlling the fight followed by Phenomenon looking to pick up the pace and punish with a swift shot to Red Storm. For about two minutes, the machines were back and forth with roughly equal balance of pinning and throws.
Unfortunately, Phenomenon was inverted after an interaction with Red Storm. Usually the bot would pop back over, but for some reason, there was no response from the machine at all; no wheels turning nor arm twitching. Besides being an incredibly disappointing end to the fight, the issue was also concerning. There has been a history of radio issues with these machines and ELRS was supposed to be the solution so if this radio system proved to be an issue then it would have grave concerns for all future plans (and other machines).
Loser by KO, 1-1

Instead, what I found is a seemingly insignificant failure mode come out in the worst way. The LED added before the event to indicate power seemed to have both of its wires slightly nicked and potentially shorted against the AR500 top plate. There is no obvious idea how this happened besides normal jostling, but after pulling out the LED from the receiver, the robot worked flawlessly in the test box. Disappointing, but overall acceptable as there didn’t seem to be other issues. On to the next fight!
Demon Core
Phenomenon’s last chance to get into bracket came against Demon Core, a machine made from a massive piece of aluminum that fights by spinning its entire body. Moments before the fight, the team behind Demon Core noticed an issue with the controller of the machine forcing them to hurriedly disassemble the robot just before heading down. The team was able to get the machine down to the arena, but they had some issues that led to Phenomenon being able to control the machine and get it stuck on the wall.

After an unsuccessful unstick, Demon Core was stuck. The team was visibly disappointed and invited a free shot from Phenomenon so I obliged. The robot was still stuck, but the team was far more pleased to see the machine get hit so the blows kept coming.

After some highlight-reel-worthy shots, the baseplate was curled open and what looked like critical components were exposed and the onslaught ceased. Its always a risk to free your opponents, but sometimes you just have to remember that its important to put on a good show too for competitors and fans alike.
Winner by KO, 2-1, In to Primetime
Megatron
Now that Phenomenon was in bracket, it was time prepare for the next fight who was….Megatron. Just like March before it, Phenomenon had to serve as giant slayer. Everything is on the line; beat the best and qualify for the Grand Finals in December. I’ve said before I wanted to test my metal against the best and there was no better time to do it then under the brightest of lights.
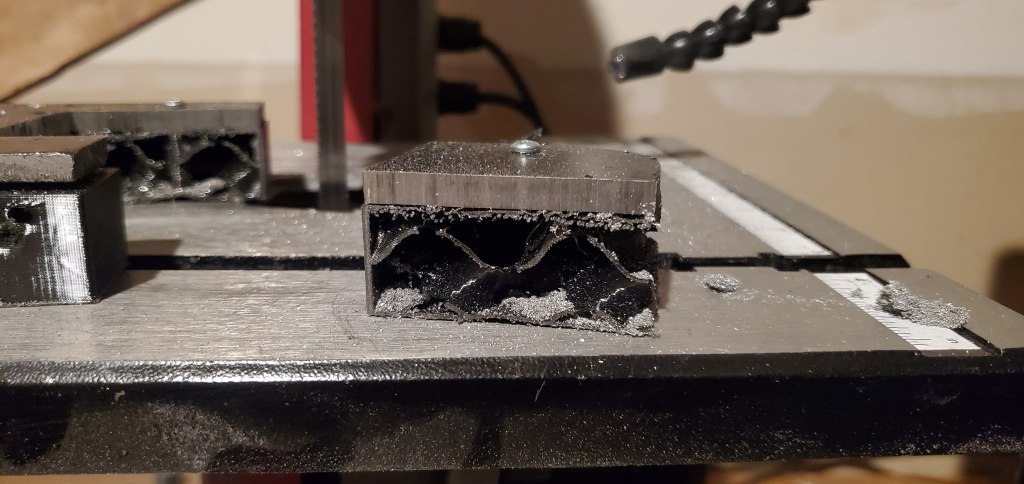
To prepare for the most powerful top-attack robot in the class, it was important to armor up. The lesser emphasized innovation for this revision of Phenomenon is the internal lifter gearbox and it was specifically for this purpose. Since that assembly was safely protected under the top armor, it was easy to layer it up. The left side has a base level of 3mm AR500, a 3/4in TPU spacer, and another (already bent) AR500 plate on the top. The right side is similar though you can replace the AR500 with 1/4in 6061 Aluminum. You can see a cross-section cut of the TPU and the top plate above. The TPU uses very sparse settings (2 walls, 15% gyroid infill)in order to make a spring. Since Megatron strikes so hard and so fast, the best way to absorb that energy without damage is to spread it out over a longer distance i.e. work. The stiffer top and bottom plates resist puncture as Megatron’s disc could easily cut through the smaller material in a small location instead of spreading out the energy over the larger sheet. This composite structure is critical to survive such power.
Even with these structures protecting the top of the robot, the update to pulley system is still a point of major concern. Originally the weapon motor is lower in the chassis to better hide itself, but because of the reshaping to fit the bigger battery it was now far more exposed than hoped. A piece of 1/2″ Tegris was added to cover the motor, but due to it being so close to the motor the strategy was to keep Megatron’s weapon away entirely; the best way to avoid damage is to avoid being hit.

This clip summarizes the majority of the fight. Due to Megatron’s longer forks, it was able to be the aggressor in the fight with Phenomenon largely having to be defensive by trying to get angles and create space. This defensive strategy is never how one wants to fight especially against a machine that thrives on precise aggression. One of the key strategies was to keep the AR side facing Megatron; since the lifter was internal it had the most protection from the hammersaw and showing the other side makes the main weapon vulnerable. Though it was not going to defeat Megatron at this rate, it was going to stay in the game longer and sometimes that’s all that’s required for something to happen.
In this moment you can see why the lifter can be such a valuable asset; the steel arm can easily press through the front TPU wedgelets and potentially get a lift off of the main machine. If it weren’t for the entangled forks and Jamison’s quick reaction, the lifter could have tilted up the body of Megatron and exposed its bottom to a quick charge from the blade which could rapidly change the direction of the fight. It also exposed the importance of longer forks; since the lifter was the longest point it had the best chance to interact with Megatron, whereas the shorter forks never got purchase. Longer forks aren’t the perfect answer to issues, but this is certainly a case where they could have helped.
In this brief but eventful sequence, you can see the use of the lifter as an unstick device (it was stuck on a piece of scrap wood), the resilience of the top armor from a full top-attack, and the immediate loss of equilibrium once the parts were torn off. Even with the more forward weapon, the weight of the lifting arm and forks (or horizontal wedge) still keep the machine balanced so the moment Megatron knocks it off it takes a great deal of effort to avoid wheelying.
In the next moments, Phenomenon is destabilized (but due to the ear geometry worked on since Grand Finals of 2024 it was able to self-right quickly)and Megatron’s treads showed a rare issue where he spun around so fast that they became dislodged from the pulley. This is why its important to stay alive.
Due to the chassis being slightly warped from the hit, messed up weight bias and the careful driving of Jamison to never let Phenomenon get around to the back or sides, Megatron was able to hold off for the last ~45 seconds and make it to the buzzer. At the end, I knew it was going to Megatron as it had been dominating most of the fight and was relatively undamaged but I did appreciate the fiercely tactical nature of the battle and the functional Phenomenon at the end.





The final damage total was fairly light for a match against the reigning champion. One of the two v-belts was cut, the lifter mount was chopped off (a understandable weakness given the force of the hit), a small chop to the front rail (which may have actually struck the motor in the previous mounting position so that worked out well!), and some damage to the top armor. The mounting bolt took the brunt of the force (hence the extreme bend and extremely marred head of another) but the plate itself was fairly together. The crater in the plate was from its previous fight with Aethon in March where it was rigidly mounted to the chassis and deformed. In this case, the back right mark was the blade of Megatron where the plate compressed the TPU enough to absorb all the energy. The physics checked out! Even so, Phenomenon lost to Megatron and was now out of the tournament without a guaranteed qualification.
Loser by Judges’ Decision, 2-2
Takeaways
There is a bit of annoyance with Phenomenon going out so early especially since its only losses were to the two top seeds of the tournament; in a different timeline it would likely have challenged for a golden dumpster. Though not guaranteed, there was an interesting rock, paper, scissors between Megatron, Red Storm and itself: Megatron beats Phenomenon, Phenomenon could beat Red Storm, and Red Storm beat Megatron. It’s a nice little connection, but ultimately one must beat the best to be the best and Phenomenon is not at that level yet.
On the bright side, I am very pleased to have two full machines ready to go. The other Phenomenon which fought Demon Core has no damage on it whatsoever and the machine from fighting Megatron could be repaired in less than a half hour to fight again if needed. The only key issues that could be addressed are:
- Keying the mounting forks into the front rail for better retention
- Longer forks for fighting Megatron
- Reinforcing lifter mount
Since these changes are relatively small, there is plenty of time to address them by the October event.
At a high level, a great deal of time will be spent building up new Phenomenons designed around the hubmotors. These chassis will likely be used as the new Vorions for Finals (especially since many of their components came out of them to build these) and the Phenomenons will get entirely new chassis to build around. With the creation of the Bonebox (directly designed in collaboration between this team and Team Just ‘Cuz Robotics) they can prove to be an excellent combination with the hubmotors to create an even lighter/smaller Phenomenon that could feature more experimental aspects to try out.
Check back in for more updates and feel free to read through other event reports and robot build logs!

Leave a comment