An accidental first event of the year! Despite wanting to stop after Finals to make version 3, the low entries in the 30lb weight class for this event posed too great of a tactical opportunity to avoid; with only 9 entries in the class with 8 going to Primetime and 4 to qualify for the World Championships it was worth the risk. With only ~3 weeks out from the competition it was time to get into gear.
Upgrades

As with all good fighting robots, the competition begins in the design phase. To ensure the mobility issues I had to fight through at Finals does not return, Phenomenon was shifting to 4WD. While this was originally to be saved for version 3, the decision was made to do a slight upgrade to version 2 to incorporate this change as a way to soft test this upgrade. Due to the short wheelbase of the robot there was some concern on how effective this would be so efforts to prototype began.
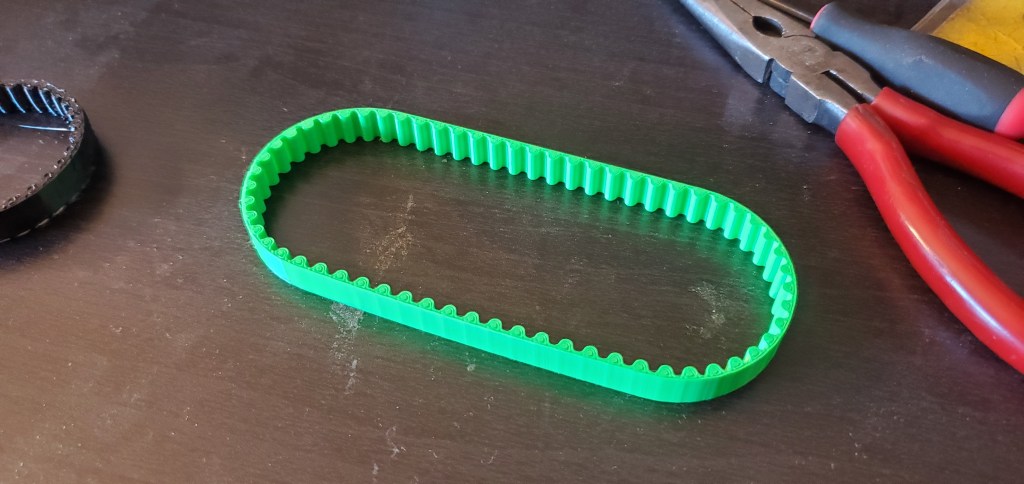
After some efforts to tune model and print settings, I was able to emulate the timing belts in TPU and cast wheels to prototype. By adding these to printed side rails and a printed shaft it reached “pretend-o-bot” status quickly. Though it took a few extra days from building, this short test confirmed the increased functionality over the regular 2WD and outrigger combination last year.

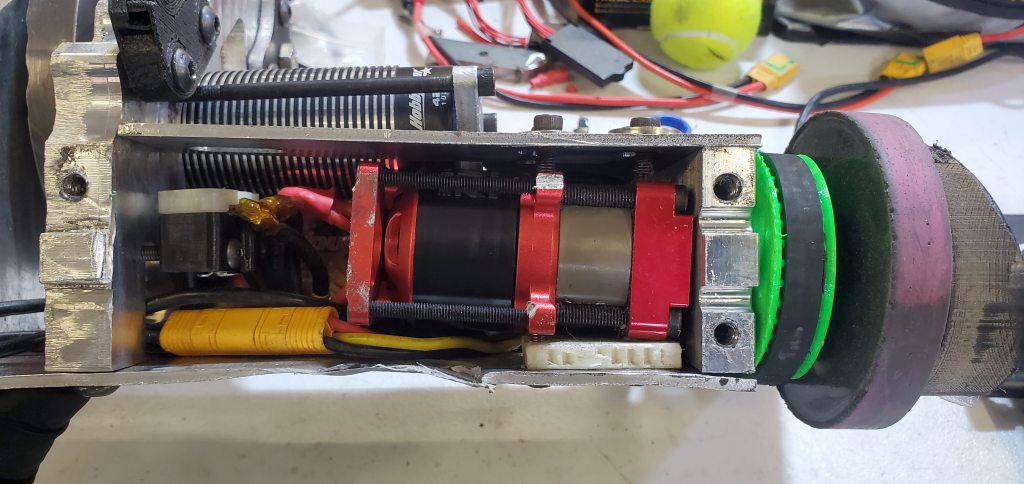
Instead of trying to repair the old motors after Finals I decided to bite the bullet and buy the complementary motors to complete the bulletproof Zomboxes. The cages around the motors made them tight inside the chassis, but ultimately proved to be more resilient under impacts and better to keep wires from interfering with the motor during use.
This “pleatherweight” phase was now complete and it was time to make some real parts!
Battle Against the Cold
It was at this time that a glacial cold front arrived in the eastern United States (outside of Florida, of course). With temperatures going as low as ZERO DEGREES FAHRENHEIT (that’s -17C) in Maryland and over one foot of snow covered in ice, the logistics chain came to a screeching halt. Multiple days were spent breaking ice and shoveling snow for normal life to resume let alone robot activities.
Since the CNC router was in the garage this meant to machine anything meant standing in sub-freezing temperatures for long periods of time (running a heater at the same time tripped the breaker and risked ruining machining operations). This also meant the coolant (which is partially water-based) began to freeze in the tubing lines causing the endmill to clog with aluminum and shear apart. To make the changes it was time to pull on old connections.




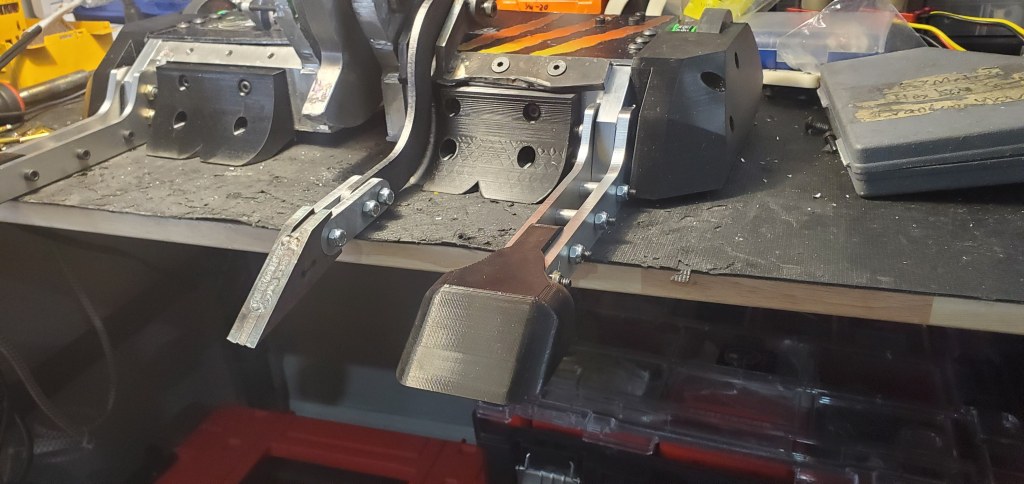
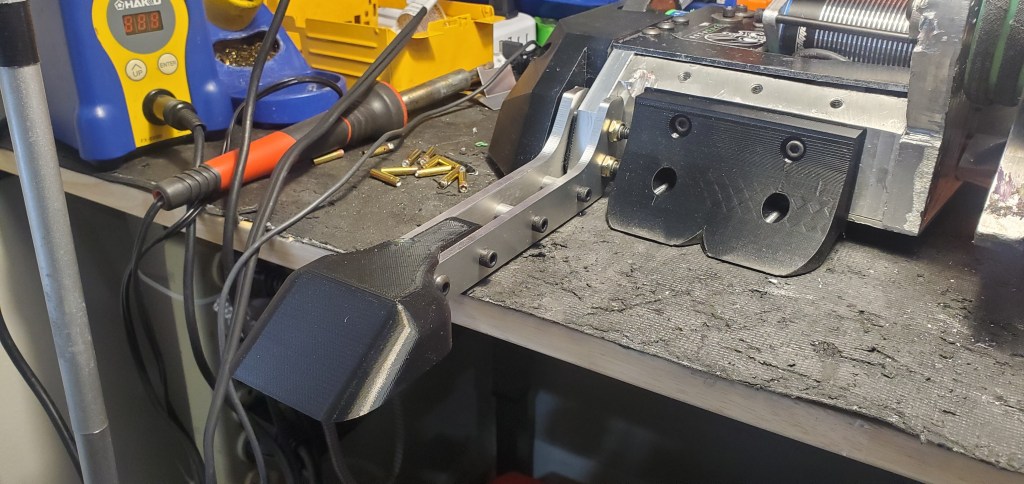
Owen (builder of Equinox and Leatherback) machined the new frame rails for me at the Terrapin Works machine shop. Thanks a bunch for the help! The holes and threads were then finished by using the robot itself as a jig.

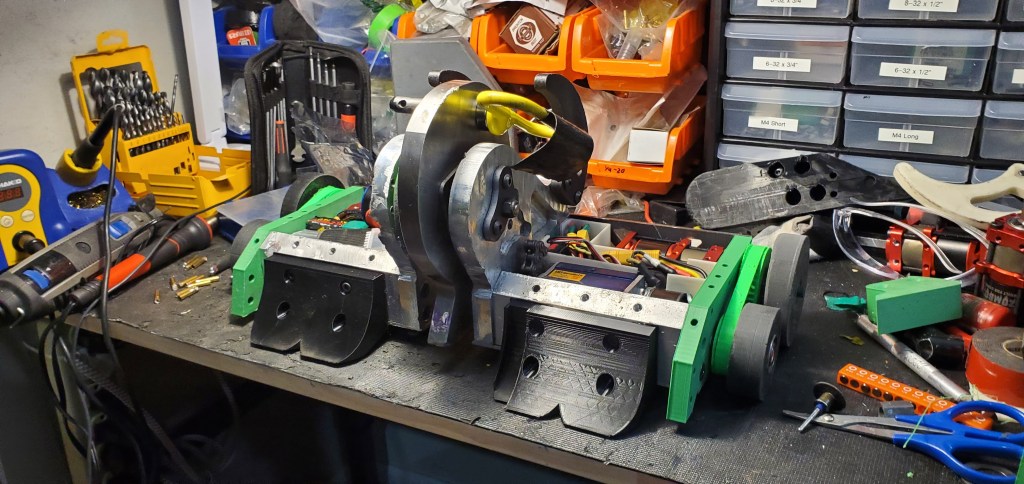
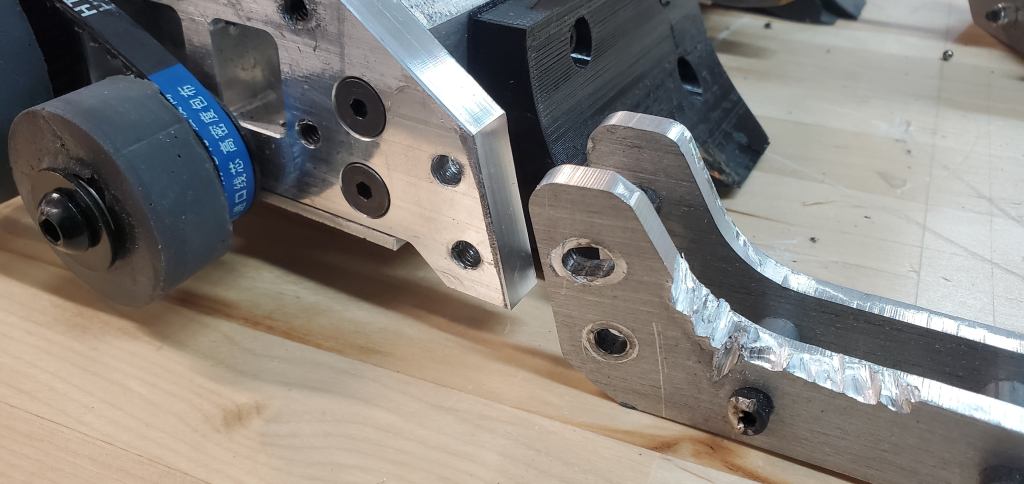
Here’s a look at the 4WD update. The issue with the outriggers used last year was the varied conditions of the floor and the nature of sliding friction versus rolling friction. While the UHMW outrigger were generally good, as the day goes on and the floor gradually grows worse, it risked uneven riding on floor gouges and hooked them a few times. This is magnified by the nature of sliding friction which increases by surface area. By comparison, a wheel’s contact point is much smaller and (due to being powered by the drivetrain) actively helps the robot move better.
The front wheel is small due to minimizing weight and maintaining strength in the frame rail. Even so, its contact point is very close to the center of mass so its impact to overall handling was massive.
Never a good sign to see less than a week from competition especially when you’re still awaiting critical parts such as the forks and belts.
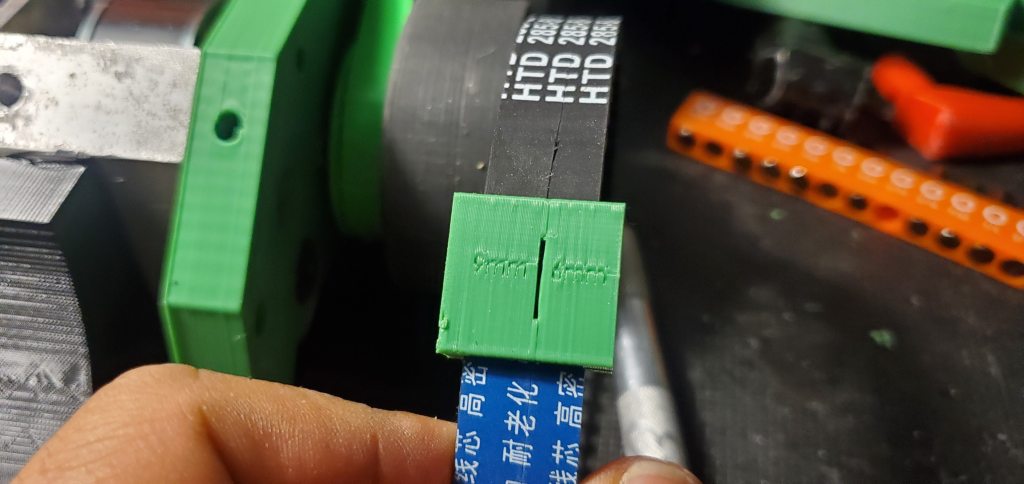

To complete the 4WD, real belts were required. Fortunately the 5mm HTD 285mm drive belts I selected were found on Amazon and arrived next-day. Since they were 15mm belts and I planned for 9mm a small jig was printed for a hobby knife to cut the belt at the right width. Because the belts had reinforcing strands alongside the neoprene rubber it took a couple of passes and some work to get the blade through but it worked! Will definitely keep this trick in mind for the future in other emergencies.
The order from SendCutSend was caught in the mail and didn’t arrive with the 6061 aluminum and AR500 steel that would form the outrigger fork. After a quick trip to the local metal store and waiting for a day above freezing to use the CNC router, the outriggers’ primary parts were machined out.



To replace the AR500 parts, TPU pieces were printed with 6 walls, 15% infill and the overall size of the tips increased. The larger tips should do better contacting some portion of the other robot to “tie” during an interaction. While it is not nearly as functional for deflecting direct weapon impacts, this will have to suffice given the logistical problems.

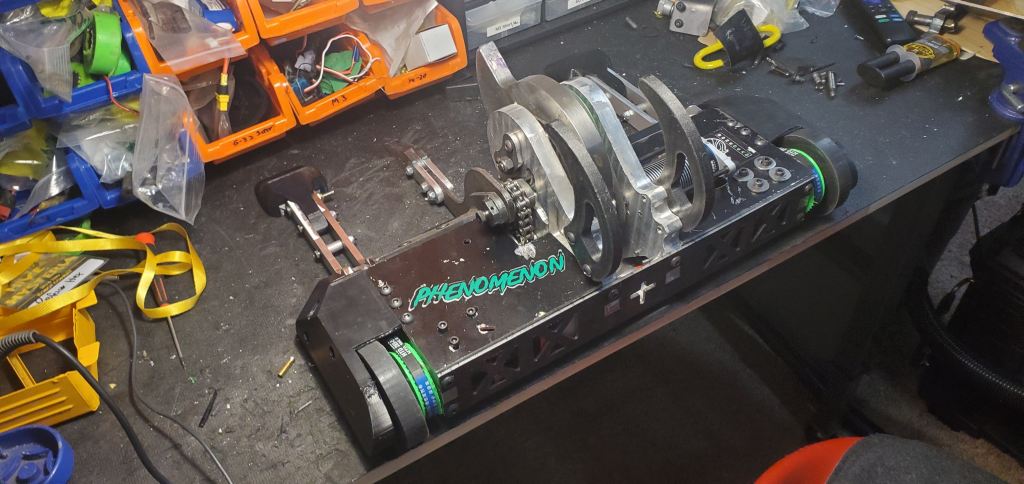
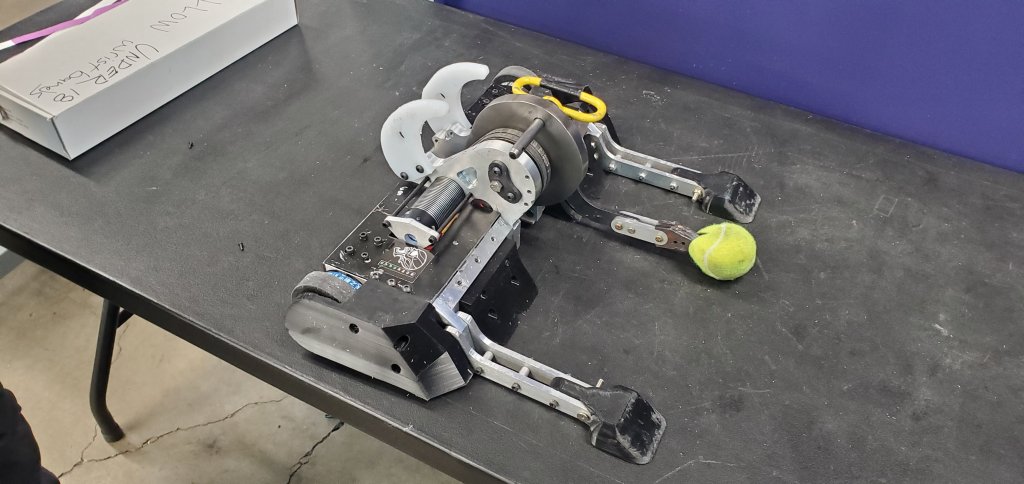
Once these came together, the robot was ready for the event. TPU front faces attached where the forks previously were to serve as secondary ground game and potential drive support if the wheels were struck. A new set of the original graphics were also lost in the mail so for now a little help from the vinyl cutter and some clever color overlap gets the name on the war-torn all-black top plates for grittier look. All-in-all it came together well despite the compromises to get it to this point.
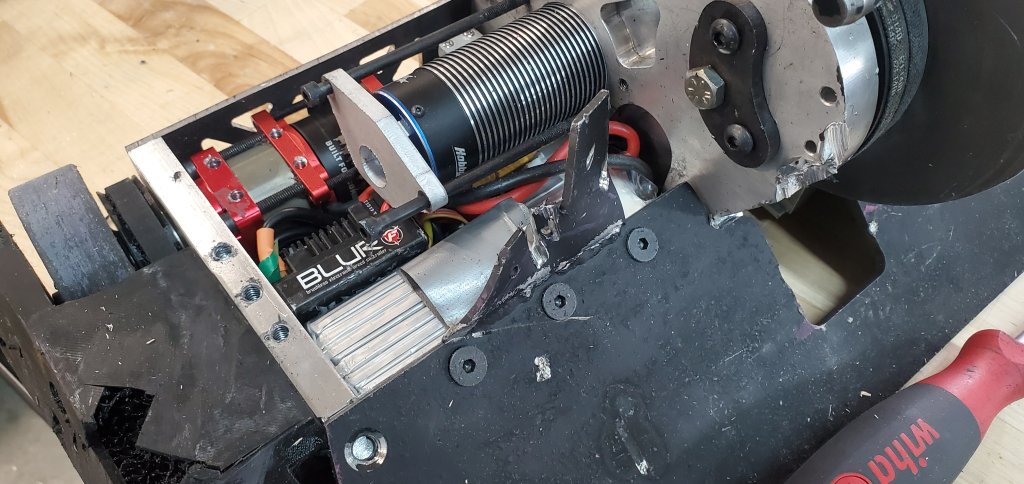
The last small update was the use of a 4292 1030kv motor for the weapon power. The lower kv and larger body (increased from 4274) would give the robot a more reliable spin-up torque and hopefully draw less power through the ESC (which potentially caused the premature weapon shut downs seen in October). The downside was a decreased tip speed. Since the new NHRL rules for 2026 greatly encourage weapon reliability I ran the lower kv motor for this event.
Event
After arriving early on Friday, it was time to get the robots going! After a few hours to deal with a pesky broken wire and shorted receiver (glad to find these here than Saturday!) Phenomenon passed safety. Phenomenon was also the only 30lber to attempt the dummy test due to its lifter. If successful this meant it would have two full weapons instead of one weapon + an attachment which helps for points in judging. It was ultimately unsuccessful as it had difficulties hooking and fully rotating the ~30lb cinder block so for now it was just weapon + attachment, but this will be kept in mind in the future as a point to build around.
Maccabot


Maccabot was the robot I was most worried to draw. Due to the issues Phenomenon had with drums and beater bars at World Champs the outrigger update was going to be the answer. Since the mail took the steel away, the only outrigger option was to run it with the TPU tips which would be mulched by Maccabot’s weapon. Therefore, the plan was to remove the outriggers entirely and invite direct weapon hits. Since the outriggers also weighed down the front of the robot to avoid wheelies, little polycarbonate pieces were glued to the outer guards. These were just stiff enough to keep the robot from rolling backwards but flexible enough that they did not limit self-righting.
Additionally, the lifting arm had a piece of steel added to it. Since the arm can affect the center of mass of the robot some (and because this was still nearly 5lbs underweight) these were attached to keep the robot as stable as possible with as little stick-out as possible. It was configuration I considered for Phenomenon but now would have to test it on hardcore.
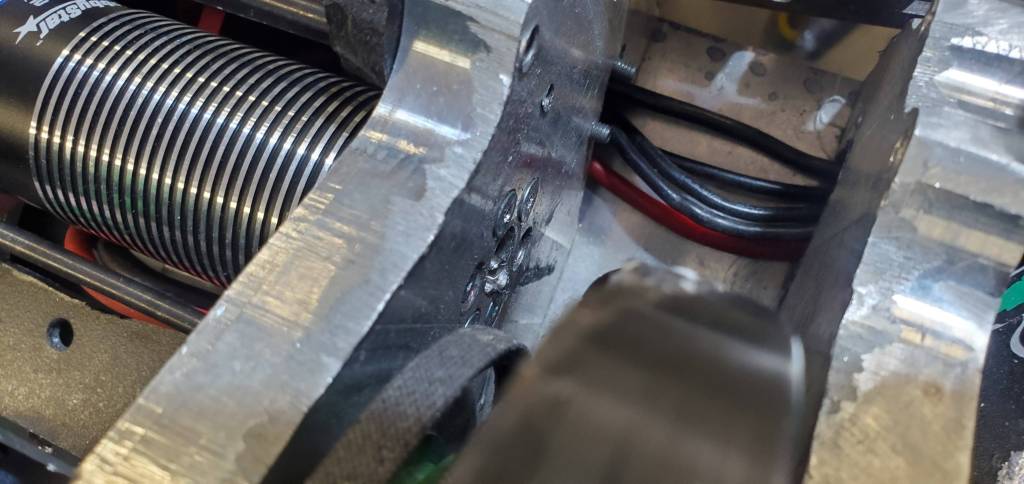




The fight itself was short and brutal with Maccabot winning the tip speed battle and mulching much of the robot. Due to the motor weapon pulley moving slightly and being caught by the blade, it was knocked leading to weapon going down. Despite this, everything else was largely functional. The Zomboxes, despite being very nearly hit by the beater bar still maintained functionality to the end with Phenomenon able to make its way to the door by its own power. This was exactly what I hoped for when I first supported its design. While this chassis was bent heavily all of the core systems were maintained saving costs and increasing confidence in reusing them in V3.
Loss by Tap Out to Maccabot. 0-1.
FSH
After the first fight, it was a switch to the second chassis for its fight against FSH. FSH was another robot made from iRobotics at the University of Illinois. alongside machines like Undertaker and Goose. These robots were all designed as a generation after Phenomenon so I view them as the result of this blog: people taking the insights shared from this blog alongside other observations to create a machine in the next generation. It has been the goal of this blog to increase the knowledge of the sport and raise for better matches, but the flip side of this is difficult: I have to find new ways to stay ahead so I don’t obsolete myself!
Though I didn’t have an image of FSH and Phenomenon, the difference in sheer size was laughable with Phenomenon now being the smallest robot by volume at the event. This meant FSH’s greater reach would be a huge difficulty as they were more likely to hit the chassis before Phenomenon could hit them.




This fight was also short with FSH catching an edge on the baseplate and curling it down enough for the robot to be high-centered. Outside of that there was certainly signs of wear but nothing catastrophic. The greatest surprise was the lifter support bearing exploding and the chain breaking. The goal was the separate outboard lifter mount would increase reliability but the chain and bearing failing show it still isn’t safe. This will have to be reevaluated in the future.
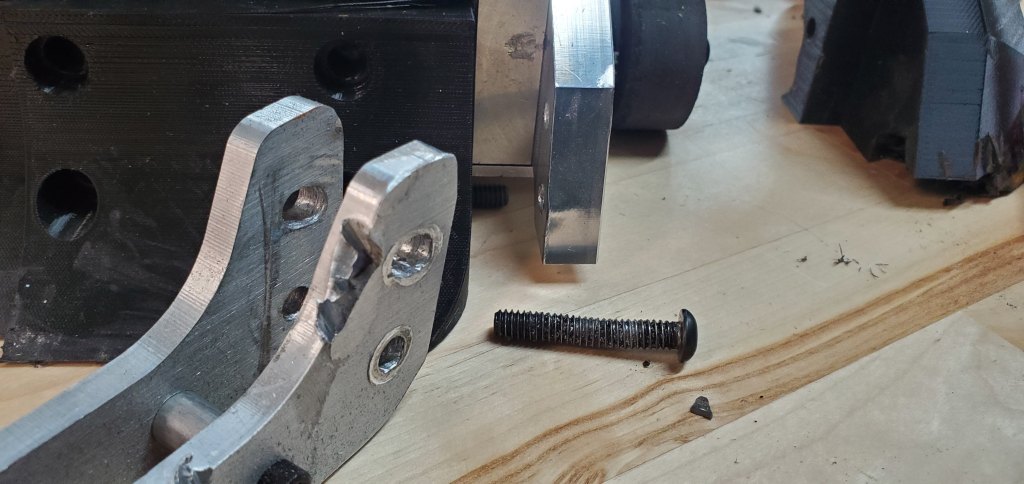
Despite the hits, the outriggers did an excellent job isolating damage away from the chassis frame rails. In the same way Emulsifier’s chassis was bent by Phenomenon I worried FSH hitting the outriggers would transfer enough energy to mar the rails but instead the bolts served as mechanical fuses which broke before any energy could transfer. There was some evidence of the mounting hole wallowing out but otherwise was still usable. This will be noted for the future.
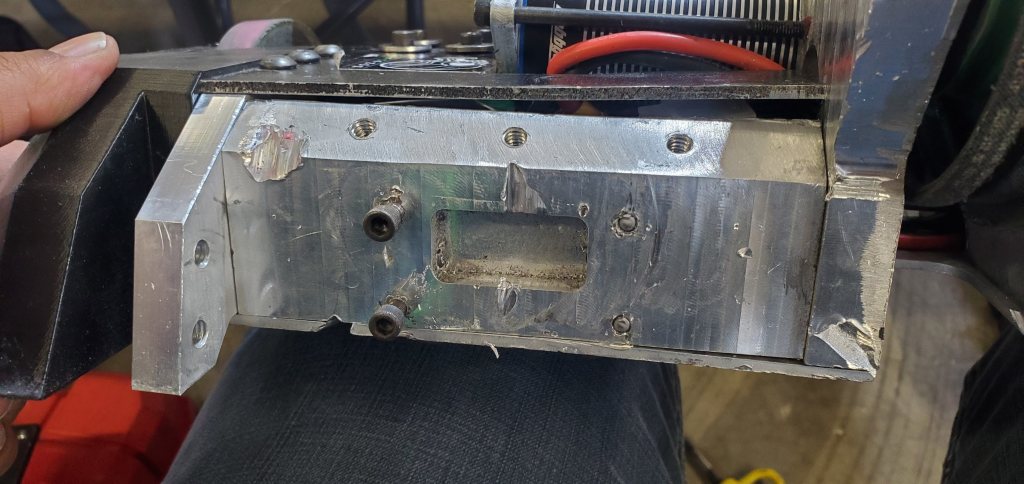
The baseplate of the robot was gradually bent back through a combination of squishing in the vice, hammer, and some work on NHRL’s hydraulic press. Big thanks to the NHRL team for that workshop, its a super convenient lifesaver!
Loss to FSH by Tap Out, 0-2.
Normally going 0-2 at this point would mean Phenomenon is out but because one robot did not show there were now 8 robots in the Primetime bracket so Phenomenon was allowed in. The mood was sour but one should not spurn free gifts. On to a potential 0-3!
quack.
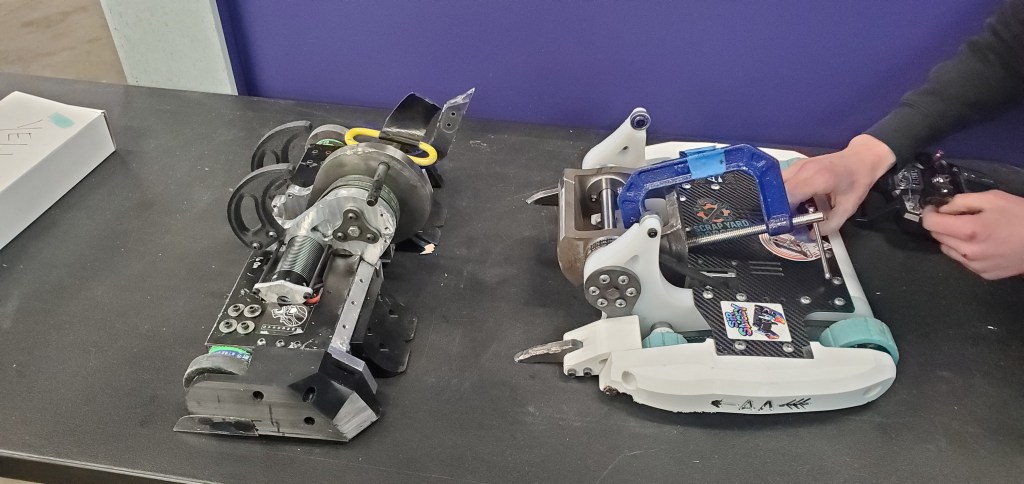
Quack was my favorite fight as it was the most cerebral setup. Quack is a modular machine so they played the configuration game by showing the horizontal and hiding the vertical configurations. Though I knew the vertical configurations existed, I elected to go with the steel wedge anyway as even its worst potential paring (their vertical configuration vs steel wedge) was better than the worst fork paring (their horizontal configuration vs forks). When they weighed-in with the vertical configuration I was somewhat disappointed but I realized a key issue they had: their forks were large plastic billets with only a steel leading edge. By comparison, the steel wedge with a sharp edge and the robot pushing down on it meant its edge was potentially more effective as I could side-swipe the forks and let the weapon cut through them.

As a result, Phenomenon took little damage! By using angles, I side-swiped the forks and struck their chassis, forcing a tap-out. This win was cathartic as the long-held view that a larger diameter weapon alone doesn’t always win fights was confirmed again.
In the fights I also found the TPU pulleys on the drive motor wore out in that match which is why the robot dragged on one side. Its a good mental note that TPU pulleys are considered consumable for roughly one full match. These can be easily switched to Nylon in the future.
Victory over quack. by Tap-Out. 1-2, qualified for World Champs!
Now that the critical goal of qualifying for the NHRL Finals in 2026 was completed, it was time to see what else can be learned before this version of the robot is retired and Gored is the perfect robot to do it.
Gored

Gored is a robot from Rose-Hulman Institute of Technology who I directly advised during its construction. It already proved itself at the RoboBrawl event held in Illinois last year and was ready to prove itself at NHRL. In many ways it captures ideas for a Phenomenon V3 so it was as though I was fighting against my own robot’s future. Since Gored used steel forks I decided trying the outriggers with even longer fork tips would be better than having them potentially beat the wedge, bending it, and rendering Phenomenon’s weapon useless.

The fight went similarly to the match against FSH where Gored’s larger body allowed it to keep Phenomenon out and its superb driving ate away at the forks. The weapon on Phenomenon also hit the pulley again so the next version will certainly require more clearance. The lifter was helping somewhat but once again the chain bound up on the sprocket leading it to be immobilized on its head
Loss to Gored by Tap-Out. 1-3
Conclusion

Just like after World Championships in December 2025, version 2 is at its limit for what it can do in the current generation of 30lbers. While there are likely some robots it can still compete against, there is a growing list of changes that require a more dramatic reworking for robots that have consistently dominated it such as long-reaching hammersaws and drums. The lifter is valuable and has moments of brilliance but the spinning weapon is still the primary tactic that allows it to win fights. The drive system is also brilliant with not a single Zombox being damaged and the 4WD adding much more consistent control to the robot’s driving even after being damaged.
Since Phenomenon is now qualified for the Pro tour and World Championships, there is far less of a push to have it compete soon. It will sit out the March and April NHRL events with that time being focused on designing the next version and some work on lower weight classes.
Until then checkout the other event reports and robot build pages!

Leave a comment