
It’s been peaceful since the June NHRL and they began their summer break. Other events had continued across the country and the world (which you can find on RCE, BuildersDB, or BristolBotBuilders) but since the bulk of the team efforts revolve around 30lb robots at NHRL it was a time of recovery and testing. The testing for the 30lbers will be covered in following event posts and each robot’s year-end review.
Outside of the 30lbers, a bit of work was done on the smaller robots, namely the 12lb, 3lb, and 1lb Plastic Ant classes. The best way to generate action is to have a goal to work towards so the Hive Hysteria (July) and Barnyard Brawl (September) were chosen as two events to test ideas on. With that, on to robot designing!
Demogorgon
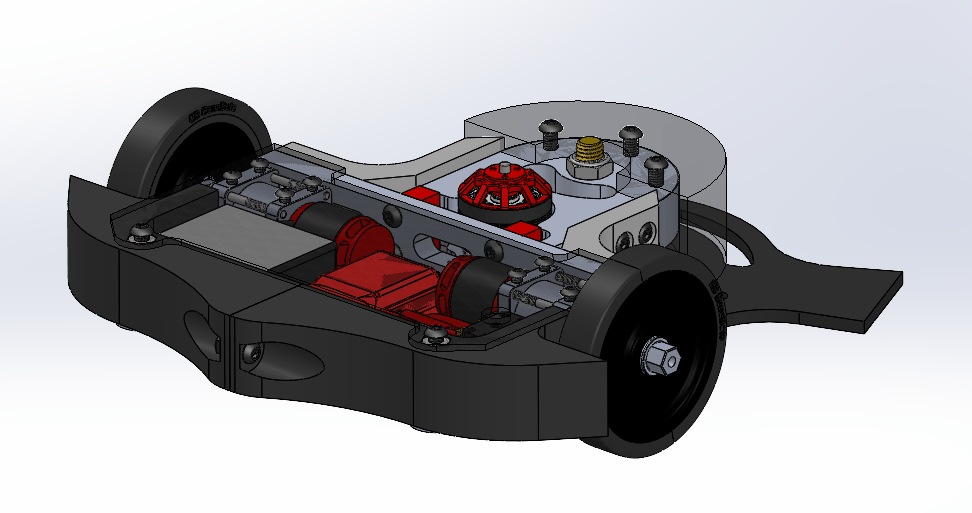
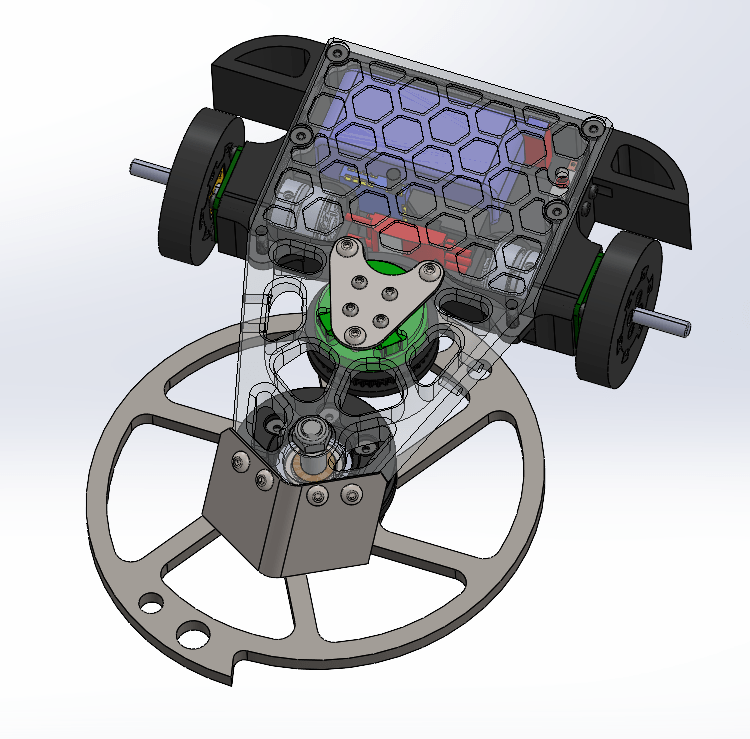
The first and most complex robot to work on is the newest version of Demogorgon. Though I have longed to rebuild the robot, the vertical-heavy 12lb class and the heavy emphasis placed on the 30lb robots meant that resources were directed elsewhere. In this case, because Phenomenon had little damage it was time to put a bit of thought into Demogorgon.
One of the greatest issues by the end of version 1 was the weapon mount was multiple pieces that bolted together. Because of this, it would slowly bend over time leading to worse and worse movement. The first update was to include a solid billet nose to attach the weapon to. Additionally, Nylon struts were printed as reinforcements. Its hard to say what the exact amount of strength it adds, but for the low weight spent on it there wasn’t a high risk.
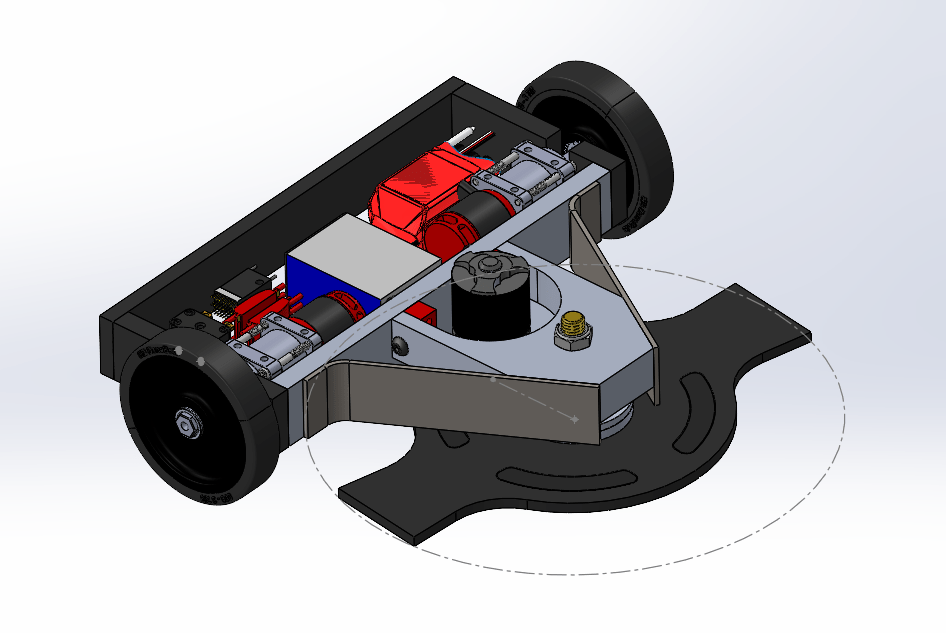
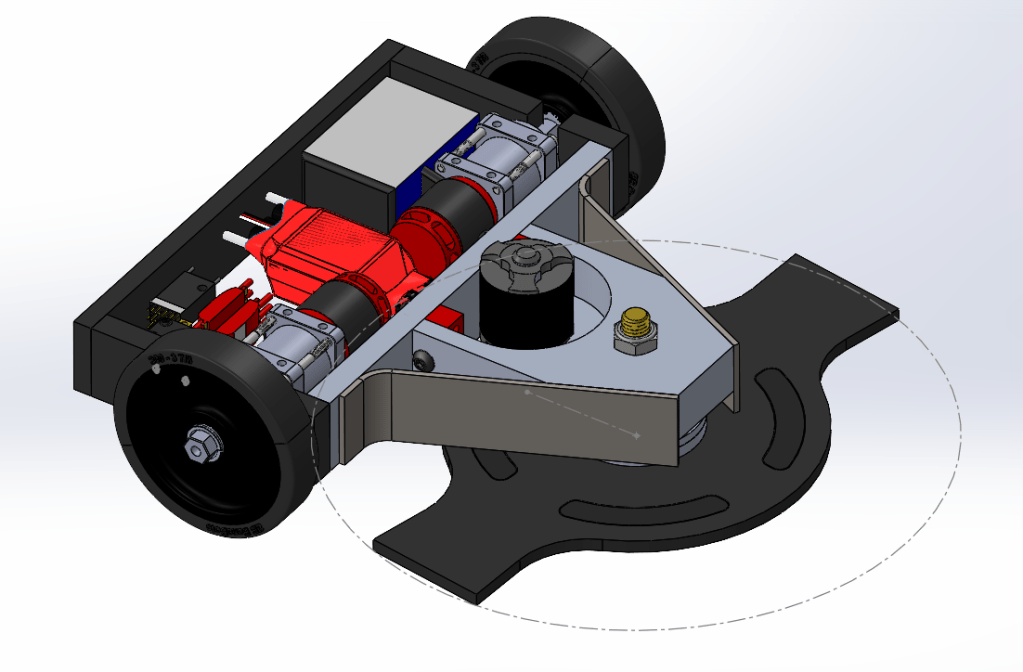
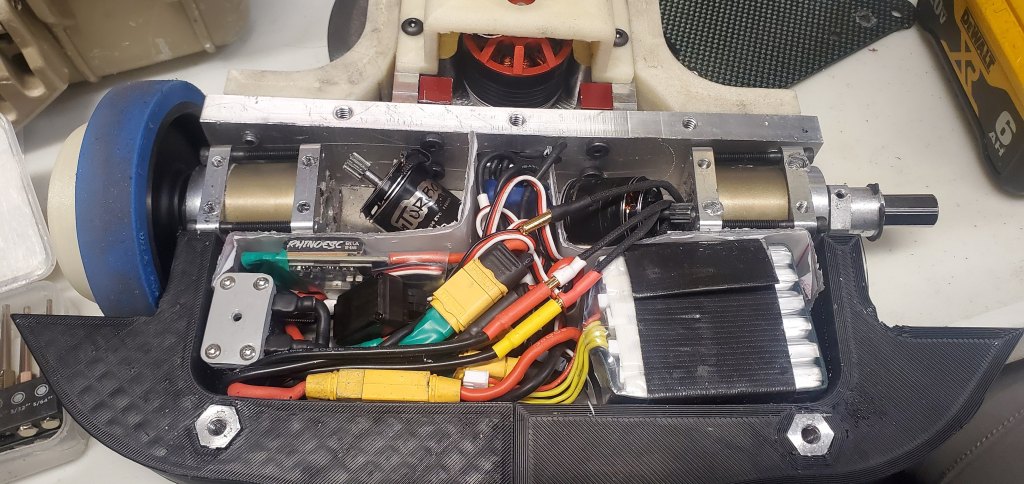
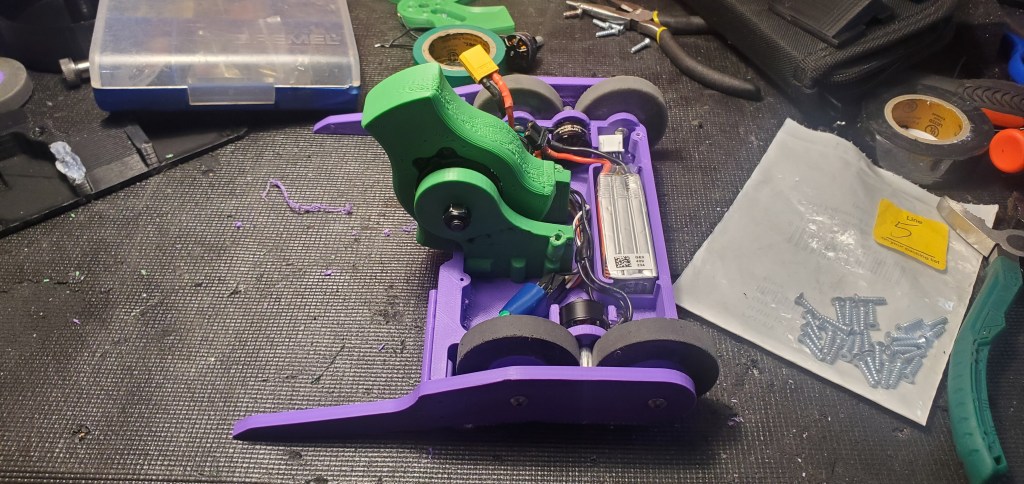
The second update was to use the Honey Cracked Beeboxes. Other machines had used them with great success so it seemed a natural way to ensure solid drive. Originally the goal was to use very large motors for super fast drive, but later it was shrunken to much smaller 2836 brushless motors. The 27:1 reduction means the torque can come from the gearboxes not from the motors so I wasn’t concerned about the smaller motor size.
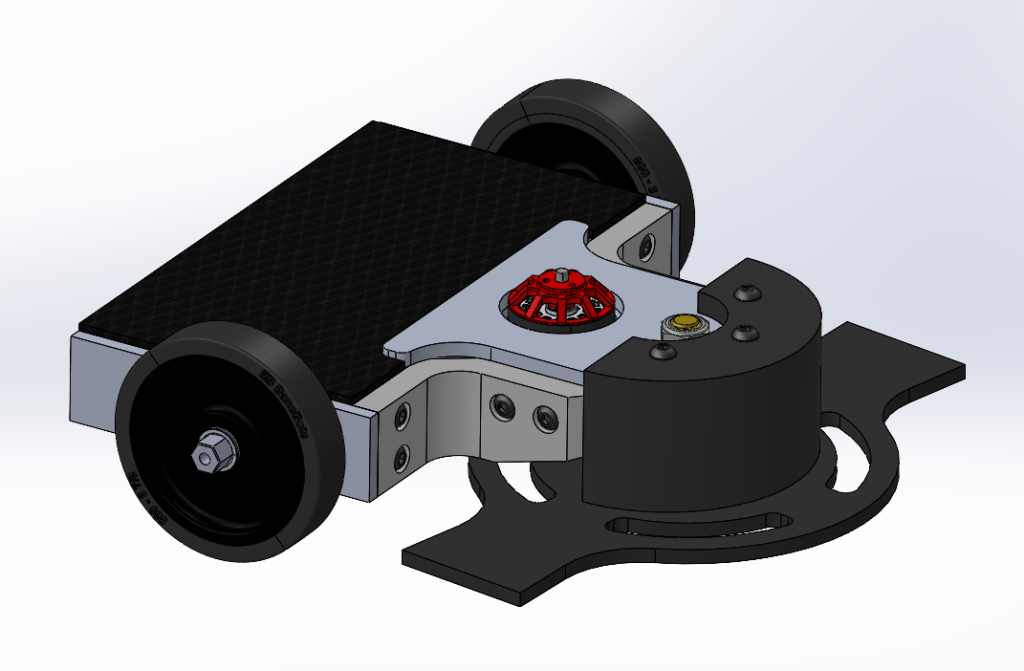
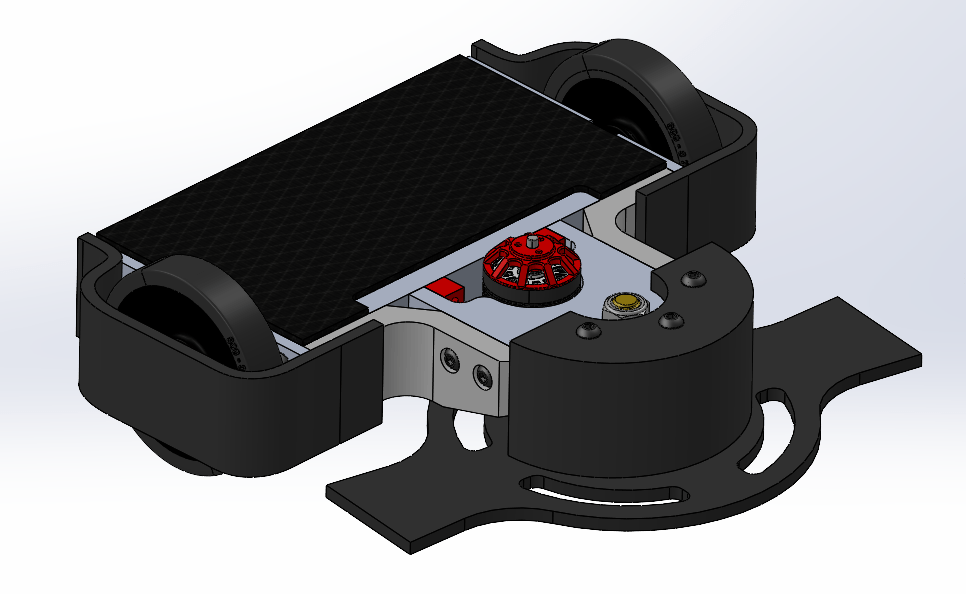
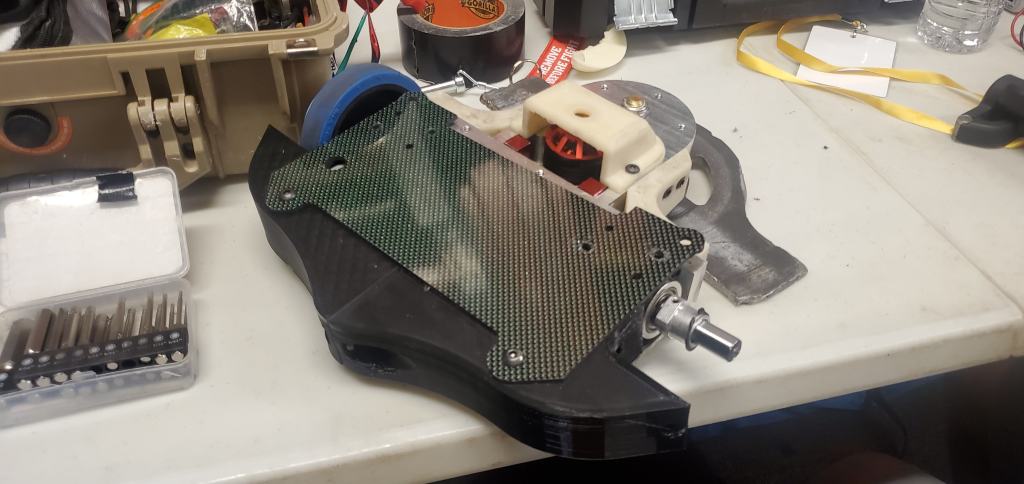
The last element was to consider how to best tie everything together. Since the weapon was support was so beefy, there was less weight to supporting the rear of the machine. The experiment was to retain the rest of the machine using only the carbon fiber top plate and the aluminum bottom plate. This method seemed to work with just the aluminum plate on the first version simply because it was rarely struck. The TPU supports around it in theory would keep some gap between opponent and internals, but that was yet to be seen.
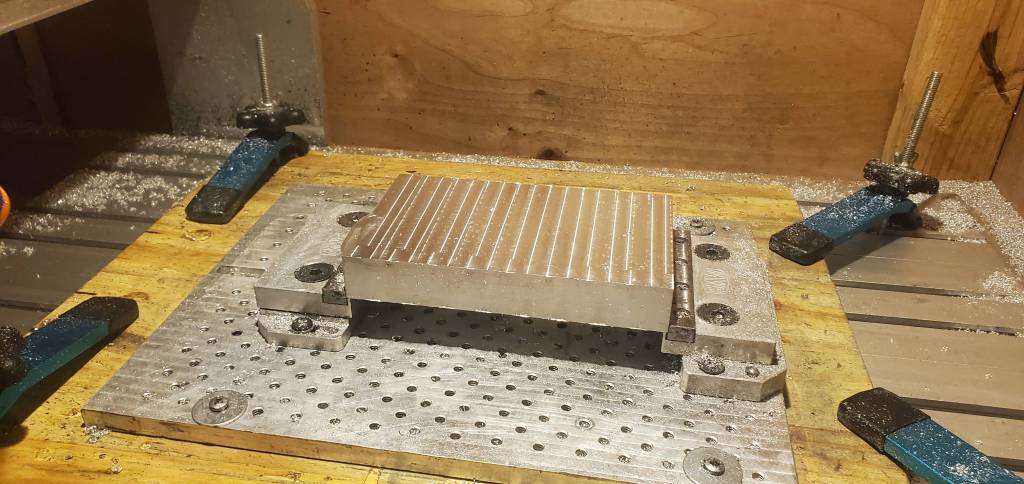



With that, the manufacturing begins! The nose that holds the blade is made from 1″ thick 6061 Aluminum billet. After clearing out from the stock piece and beginning to drill/tap holes the structure was beginning to come together.
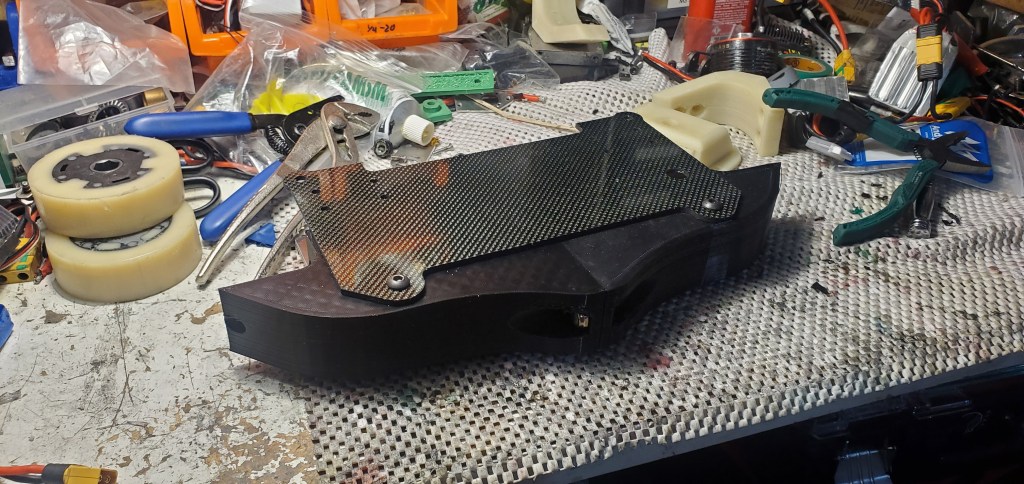
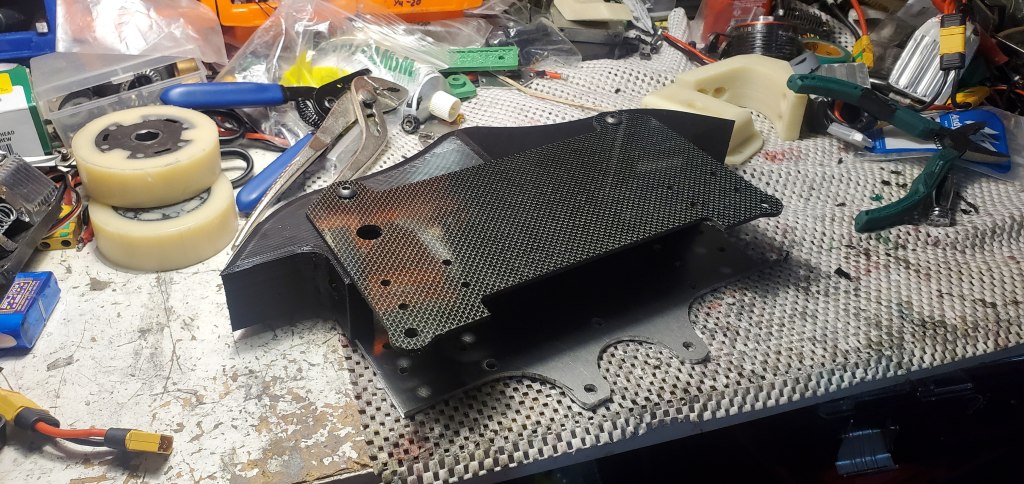



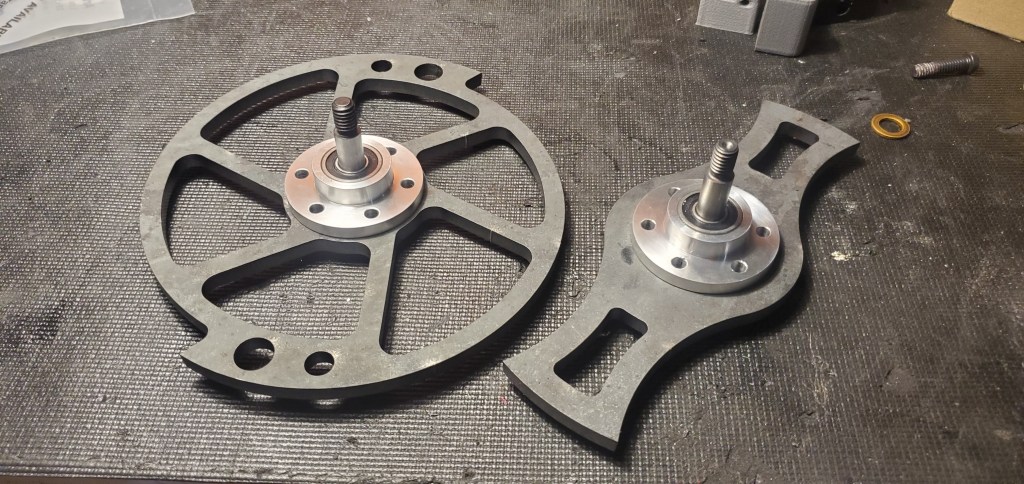
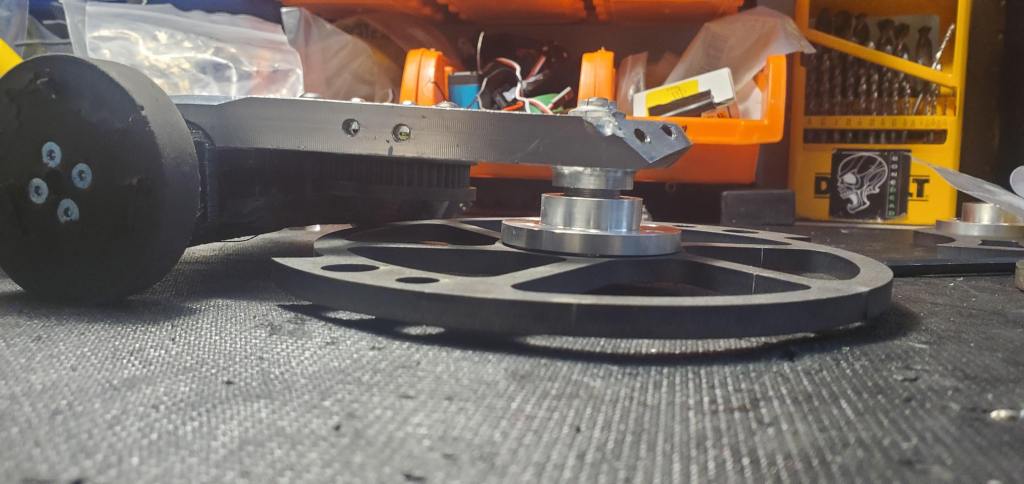
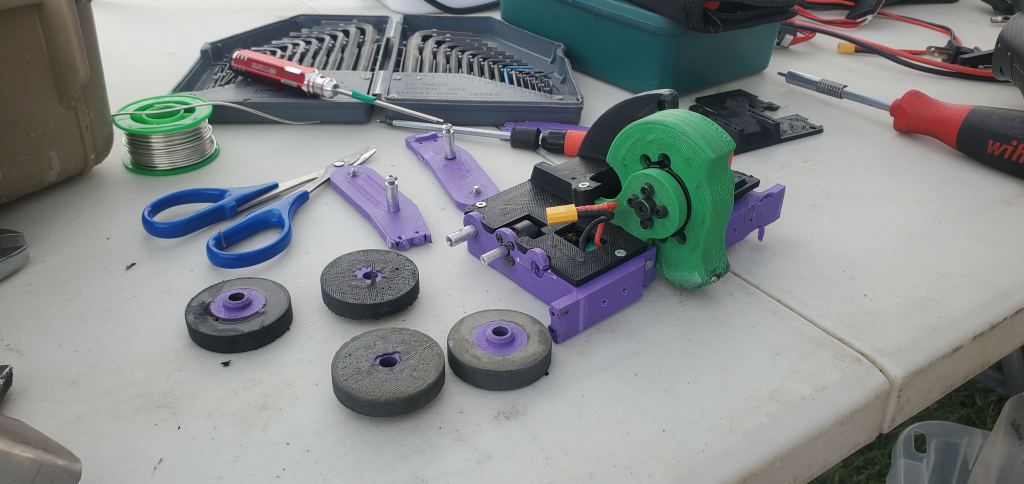
Once the top plate was machined from carbon fiber and bottom from aluminum they were attached to the rest of the machine and the shape came together. A bearing retainer plate was also made to match Buzzkill’s weapon stackup. By adding this plate, the bottom bearing in the hub is being engaged when the blade gets pulled down. Though it already has data, this was another technique worth trying out.
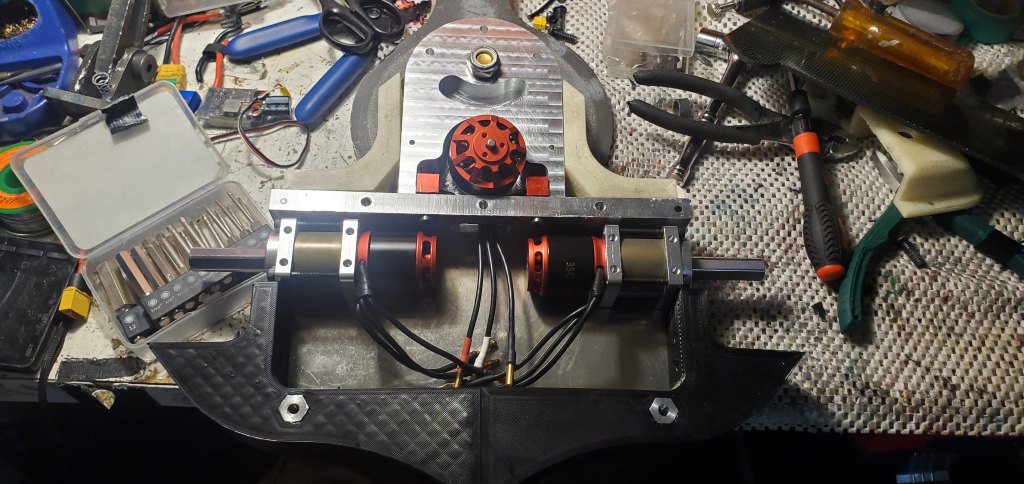
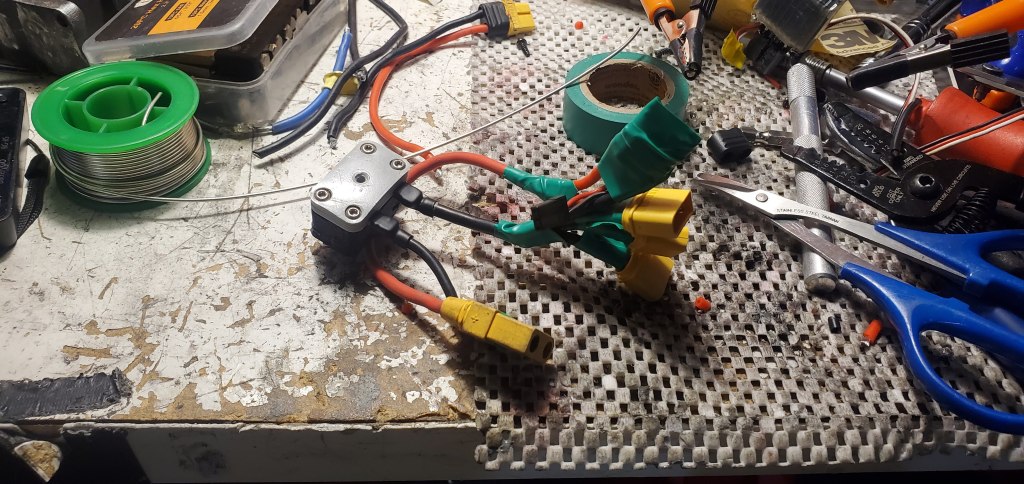

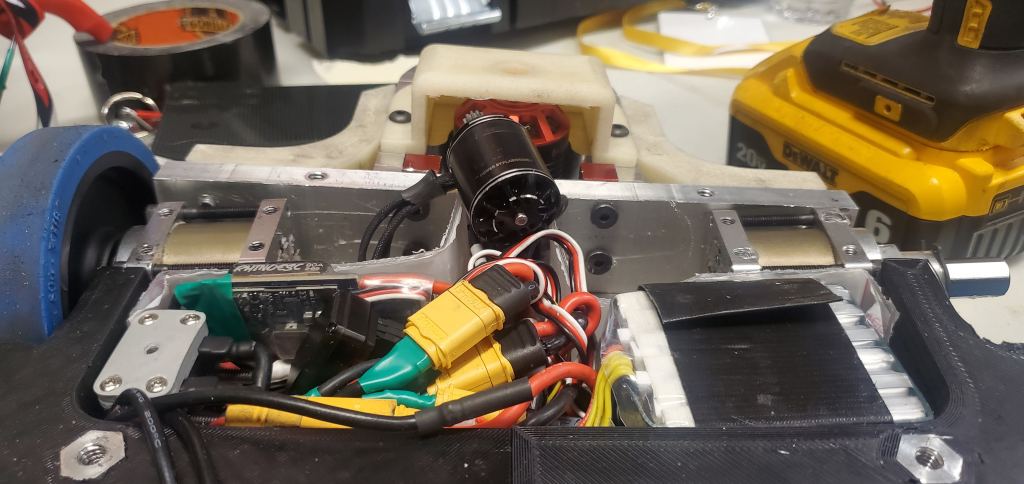
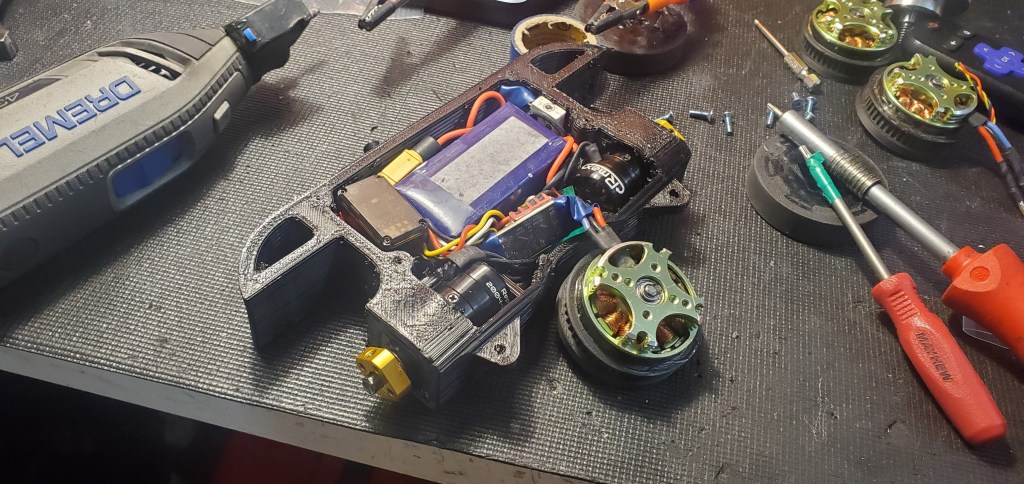
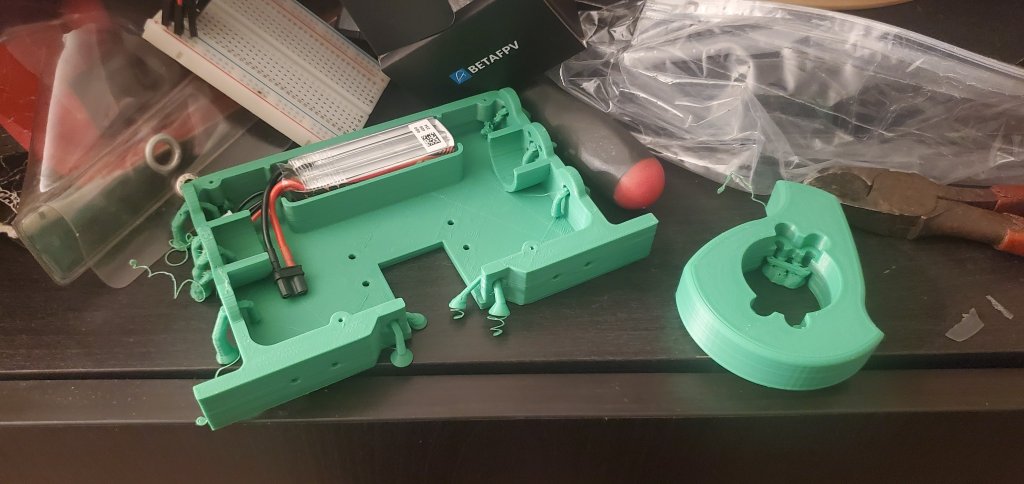
After a bit of work, motors were assembled and a wiring harness was soldered up connecting all of the ESCs, BEC (wrapped in green) and the main battery to the Kake switch. For getting the initial robot functional, spare Rhino 80A controllers from the 30lb spares were used alongside a 1500mah Zeee 6s battery. The weapon motor is a 3515 580kv motor which is smaller than the original but plenty to spin the smaller blade.

A bit of tuning later and boom! We have a robot! Its not perfect, but it should work!
Professor Hex
Professor Hex was originally designed by my friends and students at Leatherbacks back in 2019 but once that generation graduated out I took home its parts to make way for the next generation’s ideas. The top plate and weapon system have been the same ever since with the only real changes being to the drivetrain which now includes Repeat Max drive and custom molded wheels. It’s a less native idea for a 3lb robot than Phenomena and Cattywampus but it is a faster option to get going in a pinch.
Phenomenito


Phenomenito is the smallest member of the Phenomenoid family. To get more practice on Phenomenon in as small of a package as possible, this was made with the same basic idea of wide stance, center disk, and horns. Since the 1lb Plastic Ants are so easy to rapidly iterate, it was pretty straightforward to start off with the same basic shape as the large one then adapt it to a 4WD element.
This was also the first time I’ve used no gearboxes but instead am utilizing Repeat tangent drive. The speed is incredible even at lower voltages, but the ability to properly grip the output shaft with the wheels is essential. This gets more complicated as the wheel tread wears down over time ultimately leading to a fairly careful balance.
Hive Hysteria
The Hive Hysteria event was near the end of July and was the goal for trying out the new Demogorgon. This event was unique in that it uses a token system so matches were entirely driven by builders agreeing to fights.
Demogorgon
Since Blue Cheese has consistently terrorized Demogorgon and retired the first version it was best to pull the band-aid and fight it first.

The fight against Blue Cheese was violent and brief. Though Demogorgon drives well, my time driving Phenomenon has led me to forget how easily horizontal robots can over rotate around the weapon axis. Alongside the low position of the blade, Blue Cheese caught the Beebox’s output shaft and messed the robot up pretty good. That shot also took out the weapon motor pulley which killed weapon and loosed the belt leading it to become very crippled. I then aimed the weapon toward him and let him hit it again to test the weapon assembly.

Incredibly, the blade and the front assembly remains entirely intact. The rear of the robot faired far worse with the drive motors coming out and the chassis being tweaked. Incredibly the Beebox gearbox which took the hit is totally fine which is an incredible testament to its strength. Rather the baseplate itself was twisted (likely where the rest of the energy went) which meant that even if the motors stayed attached the robot would likely have been unable to keep going. The back will definitely need to be more firmly connected to the weapon assembly, but it was a good start to reacclimate to the 12lb weight class. It’s a violent place, but hopefully this lesson ensures it will be a positive one.
Professor Hex
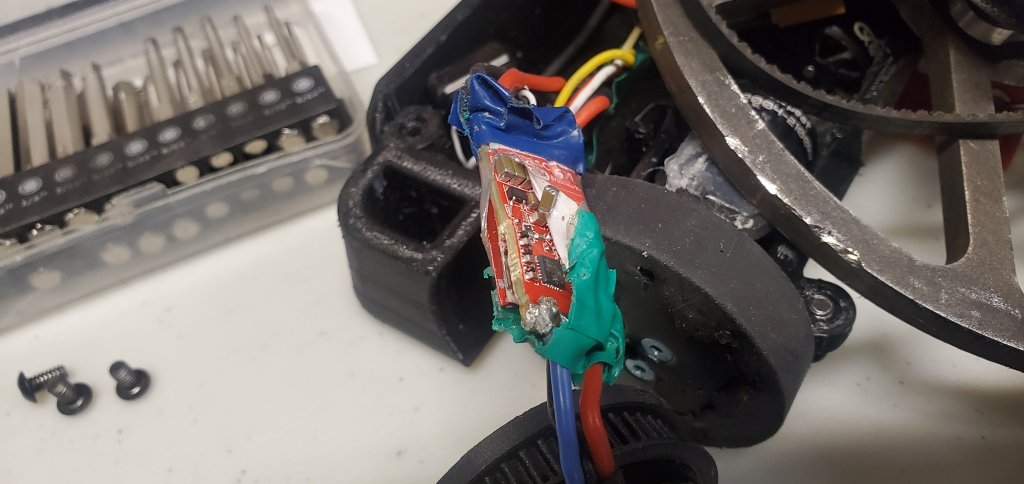
Professor Hex also had only one fight against Impakt. For over 3/4ths of the fight Professor Hex traded blows with Impakt in a incredibly violent and entertaining fight. Unfortunately, one of those shots led to the weapon ESC crashing against one of the drive motors violently enough that it broke the board. I then spent the next several hours trying to troubleshoot a new controller ultimately leading to no more fights and a still broken robot. Overall disappointing, but that just made the excitement for Barnyard Brawl all the more intense!
Professor Hex Rework
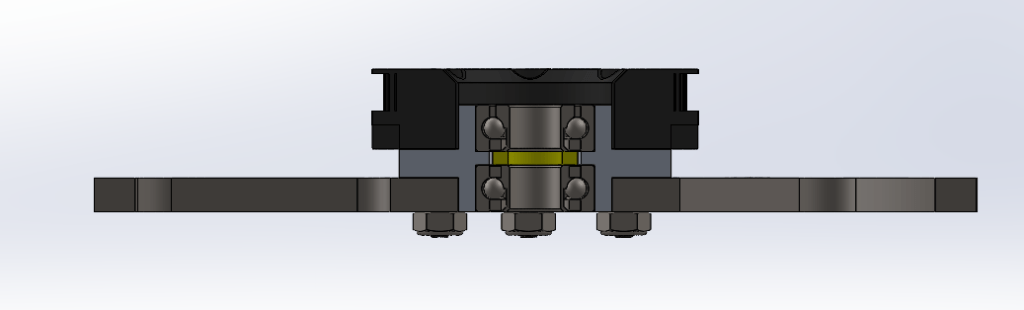
The first big update was the weapon stack. The original design from 2019 featured a hub with a straight bore where a single long needle roller bearing is only constrained by press-fit. As a result, whenever a vertical spinner such as Impakt would hit it, the bearing would slowly pull its way through the bore, allowing the blade to move closer to the ground thereby creating greater resistance against the ground which then kills the weapon motor. This system uses the bodies of the bearings as stoppers so if the blade gets uppercut it requires the bearings to be entirely destroyed or the aluminum to be sheared. Since beetleweights are so lightweight, the robot will (in-practice) just be thrown around and should be reliable.
The second update was increasing internal space. Since the space internally led to the ESC being damaged by hitting the drive motors, the next move was to widen it to make space. The other result of that is it improves the handling of the robot dramatically as the wheels can better leverage against the torque reaction of the blade. As Ray Billings talks about on his YouTube channel, having the wheels roughly as wide as the blade does wonders; if the King of Kinetic Energy makes a claim on horizontals I would happily agree.




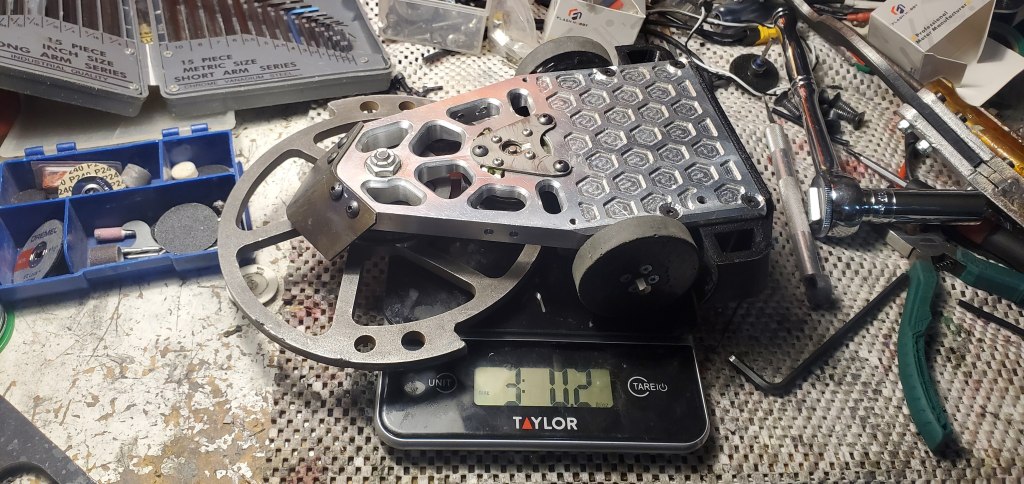
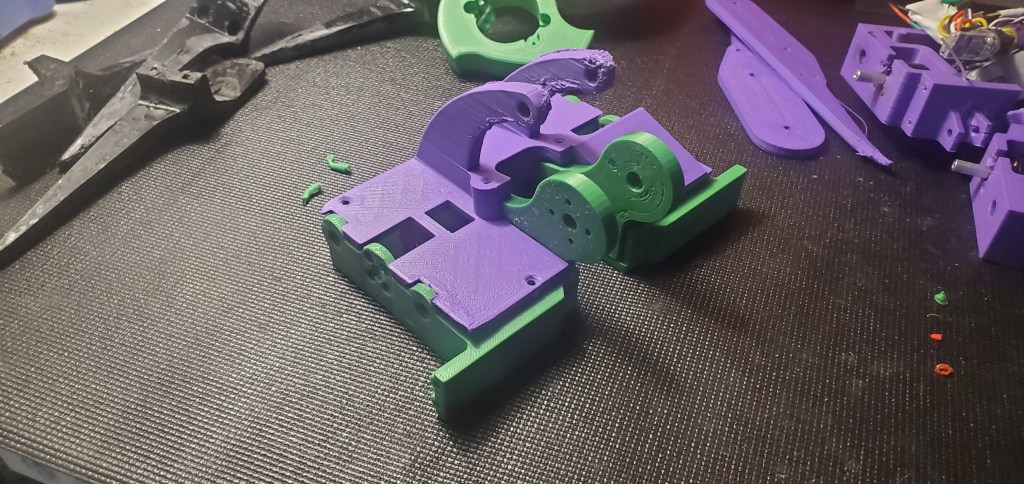
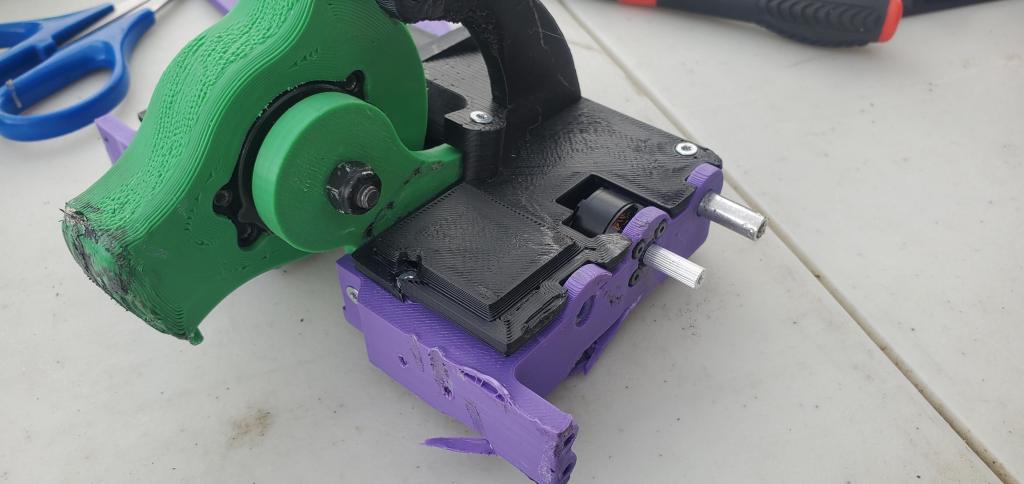
The assembly of this flew together pretty quick. The new chassis was printed in Sainsmart 95A TPU, new blades were laser cut via SendCutSend from 1/4″ AR500, hardware from McMaster-Carr, and weapon hubs machined by Chinese manufacturer LT Century. The carbon fiber drive plates were machined on the home router using a generous amount of lubricant and a vacuum to suppress dust from the carbon. Outside of the print, most parts arrived the same week as the event so it took a few nights to assemble and test it in the test box. In the photo above purple Overture SuperPLA+ was used for fitment testing as Fiberon PA-6 Nylon was dried and later printed to the final version.
During assembly, it was found that the one fight against Impakt did do some damage by bending the top plate slightly. Though marginal damage as the weapon and its motor were still correctly aligned, it was impressive to see how much damage was done to it.
Phenomenito
After its first premiere at Leatherbacks SCR@M and later at MACRO, Phenomenito had evolved to a very hard hitting a fast machine.

Phenomenito was printed and assembled very quickly. The assembly is fairly straightforward with only 7 total parts. The big thing is everything keys together so it can transmit the force throughout the robot. In a weight class where all of the materials and total mass are normalized geometry is king.
With both bots ready, its time for fights!
Barnyard Brawl
Barnyard Brawl came at the end of summer, right at the equinox. The event was held as part of the St. Mary’s County Fair in southern Maryland where 3lb beetleweights and 1lb plastic ants. Like Hive Hysteria, this event was a good goal to build toward with emphasis being placed on the reworked Professor Hex with Phenomenito coming in as more fun small-scale testing.
Professor Hex




Professor Hex sustained very little damage all day. Though it went 1-2 with loss to Ironhide, victory over Swarm, and loss to Zenith. The maneuverability increase was noticeable and appreciated as it was a very tense drive battle against Ironhide. Due to the weight of the disk, the bar was used most of the day though against Swarm (now a more conventional under/midcutter) there was great risk of Swarm hitting the pulley. Fortunately the blades sat at comparable heights so they more often went weapon to weapon (which was far more entertaining anyway). The greatest damage all day was to the wheels by Zenith which was completely reasonable given its design. Even with the direct strikes to the wheel, the drivetrain remained smooth and easy with the robot even able to drive for a little while on the bare hubs!
After swapping on new wheels, Hex was ready to go! It later grudged Peekaboo to stretch its legs, but ultimately it looks forward to its next event.
Phenomenito




Phenomenito had a very lively event with a 3-2 record with the biggest highlight being defeating the overall winner Incandescence (so much so that the first image was all of the chassis components given as a trophy) followed by defeat to overall runner-up Ignis.
Its first fight was against Best Guess, a stout lifter which highlighted the chaotic gyro on the robot (a big difference from its much wider and more stable predecessor). This wasn’t as great an issue against Incandescence since it also has incredibly gyroscopic effect, but the more controlled Ignis was able to bully it well. Ignis not only damaged the robot thoroughly (cracking the base, removing the wheels, and cracking the weapon) but it also drained the battery super low. In its last fight against Shul Shagana the battery died early on so it couldn’t self-right. All-in-all a fun and respectable record for a machine that doesn’t receive a large amount of focus. One of these days, more focus on will be put on it to win full events but losses only to the top two seeds at the tournament is nothing to scoff at.
Conclusion
All in all, it was a nice way to remember the simple joy of robot combat. While there was still preparation made for the much more serious larger robots, the smaller ones still learned a good amount with low stakes. It is good to have moments of high focus and precision, but allowing some rest is good to keep balanced.
The learnings from these robots will certainly return in the future whether it be in the smaller machines or the bigger ones! For now, check out the other active robots we have and the other event reports!

Leave a reply to Brandon Young Cancel reply